NORD Drivesystems BU0550 User Manual
Page 62
PLC logic for NORD SK 54xE frequency inverters
62
BU 0550 GB-0813
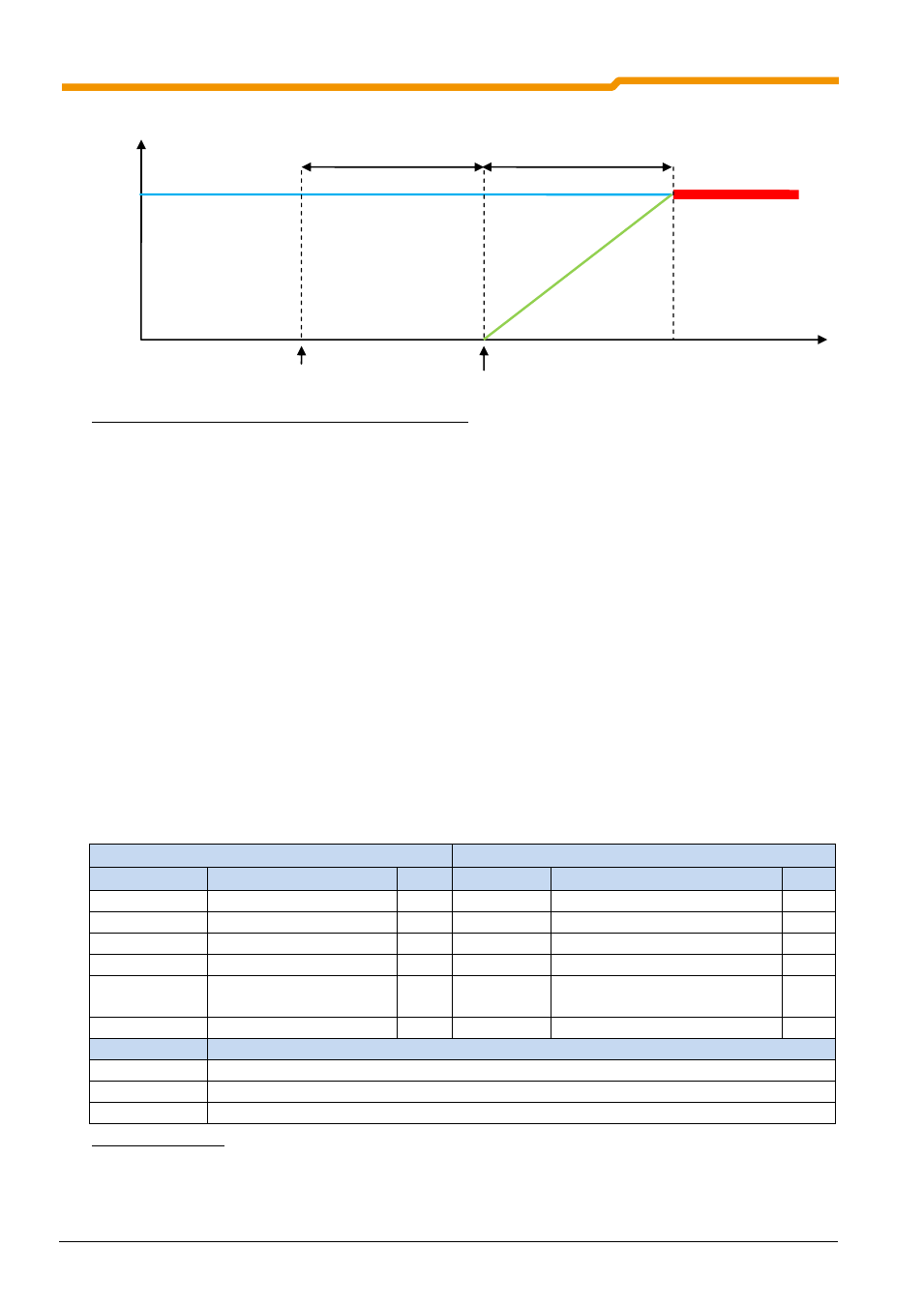
Fig. 7 Schematic diagram of the Flying Saw synchronisation process
If the function is started, the slave frequency inverter accelerates to the speed of the master axis. The
acceleration ramp is specified via the "acceleration path" ACCELERATION. At low speeds the ramp is
flatter and at high master speeds the ramp for the slave frequency inverter is steeper. The acceleration path
is stated in revolutions (1000 = 1,000 rev.) if P553 is specified as the setpoint position. If the setpoint
position INC is used for P553, the acceleration path is specified in increments.
If the initiator is set in from of the position of the slave drive which is saved in ACCELERATION, the slave is
precisely synchronised to the triggering position of the master drive.
The FB must be switched on via the ENABLE input. The function can be started either via the digital input
(P420[-xx]=64, Start Flying Saw) or via EXECUTE. The frequency inverter then accelerates to the speed of
the master axis. Once synchronisation with the master axis has been achieved, the DONE output is
switched to 1.
Via the STOP input or the digital input function P420[-xx] = 77, Stop Flying Saw, the gear function is
switched off and the frequency inverter brakes to 0Hz and stops. Via the HOME input, the frequency inverter
is moved to the absolute position 0. The relevant assigned output is active after completion of the HOME or
STOP command. The gear function can be restarted via a new activation of EXECUTE or the digital input.
With the digital input function (P420[-xx] = 63, Switch off synchronisation) the gear function can be switched
off, with subsequent movement to the 0 position.
If the function is interrupted with the MC_Stop function, ABORT is set to 1. In case of error, ERROR is set to
1 and the error code is set in ERRORID. These three outputs are reset if ENABLE is set to 0.
Table 88 FB_FlyingSaw
VAR_INPUT
VAR_OUTPUT
Input
Explanation
Type
Output
Explanation
Type
ENABLE
Enable
BOOL
VALID
Specified setpoint frequency reached
BOOL
EXECUTE
Start of
synchronisation
BOOL
DONEHOME
Home run completed
STOP
Synchronisation
stopped
BOOL
DONESTOP
Stop command executed
HOME
Moves to position 0
BOOL
ABORT
Command aborted
BOOL
ACCELERATION
Acceleration path
(1rev. = 1.000)
DINT
ERROR
Error in FB
BOOL
ERRORID
Error code
INT
ERRORID
Explanation
0
No error
1000h
FI is not enabled
1200h
Position control not activated
Starting point of the Slave
Position of the initiator
Speed
Position
ACCELERATION
Removal of the initiator
to the starting position of
the Slave FI
Both drive units
running synchronously