NORD Drivesystems BU0550 User Manual
Page 55
3 AWL (Instruction List, IL)
BU 0550 GB-0813
55
3.5.2.4
MC_MoveAbsolute
Writes a position and speed setpoint to the frequency inverter if EXECUTE changes from 0 to 1 (flank). The
setpoint frequency VELOCITY is transferred with the scaling described in MC_MoveVelocity.
The High word and the Low word of the setpoint position must be defined in parameter P553.
POSITION:
MODE = False:
The setpoint position results from the value transferred to POSITION.
MODE = True:
The value transferred to POSITION corresponds to the index from parameter P613 increased
by 1 The position saved in this parameter index corresponds to the setpoint position.
Example:
Mode = True; Position = 12
→ The FB moves to the position which is in the current parameter set of P613[-13].
If the frequency inverter has reached the setpoint position, DONE is set to 1. DONE is deleted when
EXECUTE is reset. If EXECUTE is deleted before the target position has been reached, DONE is set to 1
for one cycle. BUSY is active while moving to the setpoint position.
If the process is interrupted (e.g. by another MC function module), COMMANDABORTED is set.
In case of error, ERROR is set to 1 and the corresponding error code is set in ERRORID. In this case,
DONE is 0.
With a negative flank on EXECUTE all outputs are reset to 0.
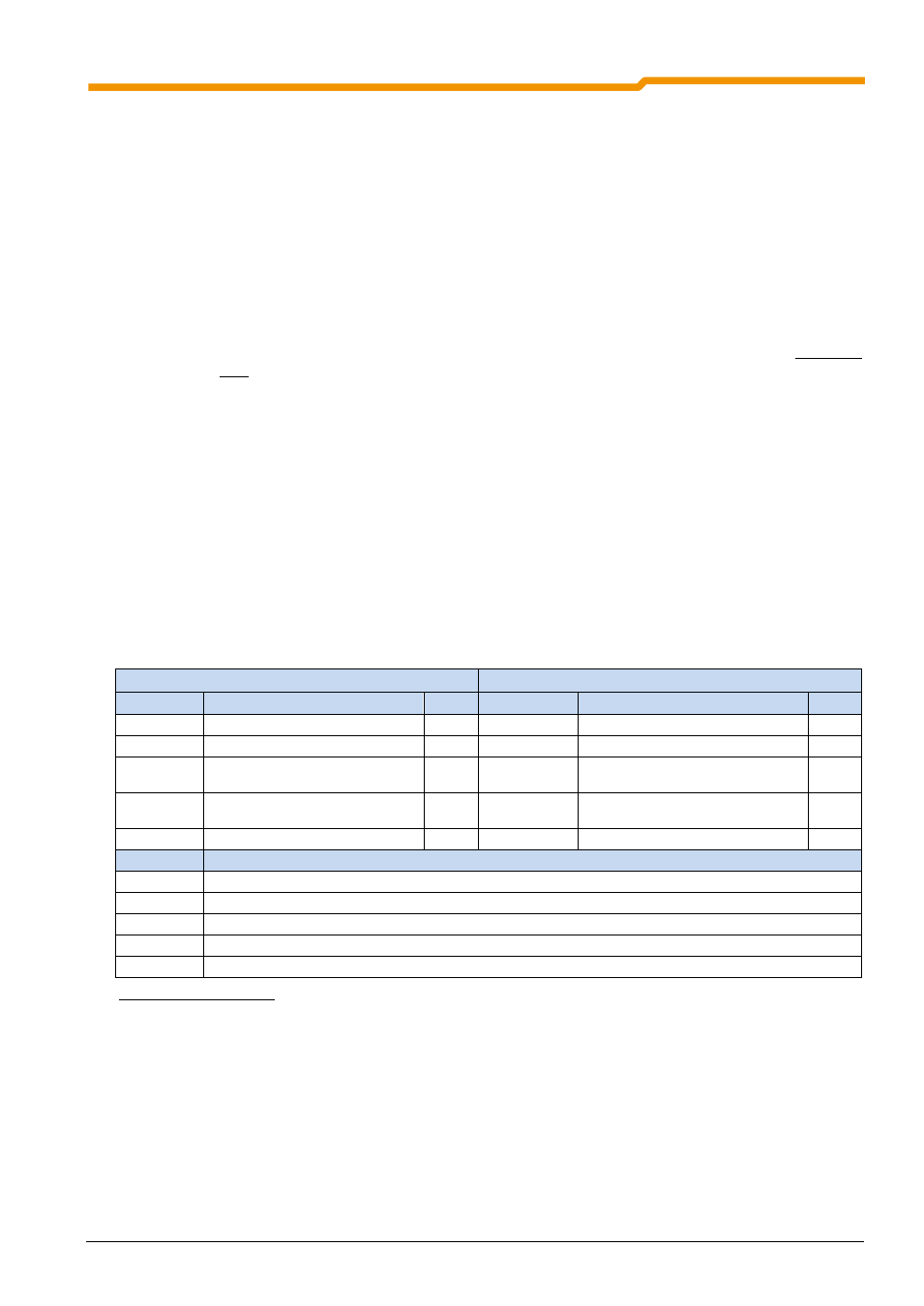
Table 74 MC_MoveAbsolute
VAR_INPUT
VAR_OUTPUT
Input
Explanation
Type
Output
Explanation
Type
EXECUTE
Enable
BOOL
DONE
Specified setpoint position reached
BOOL
POSITION
Setpoint position
DINT
BUSY
Setpoint position not reached
BOOL
VELOCITY
Setpoint frequency
INT
COMMAND-
ABORTED
Command aborted
BOOL
MODE
Mode source is the setpoint
position
BOOL
ERROR
Error in FB
BOOL
ERRORID
Error code
INT
ERRORID
Explanation
0
No error
0x1000
FI is not enabled
0x1200
Position control not activated
0x1201
The High position has not been entered in the PLC setpoints (P553)
0x1202
The Low position has not been entered in the PLC setpoints (P553)