Slope staking – screen four – Spectra Precision Survey Pro 3.80 Recon GPS Reference Manual User Manual
Page 86
GPS Reference Manual
86
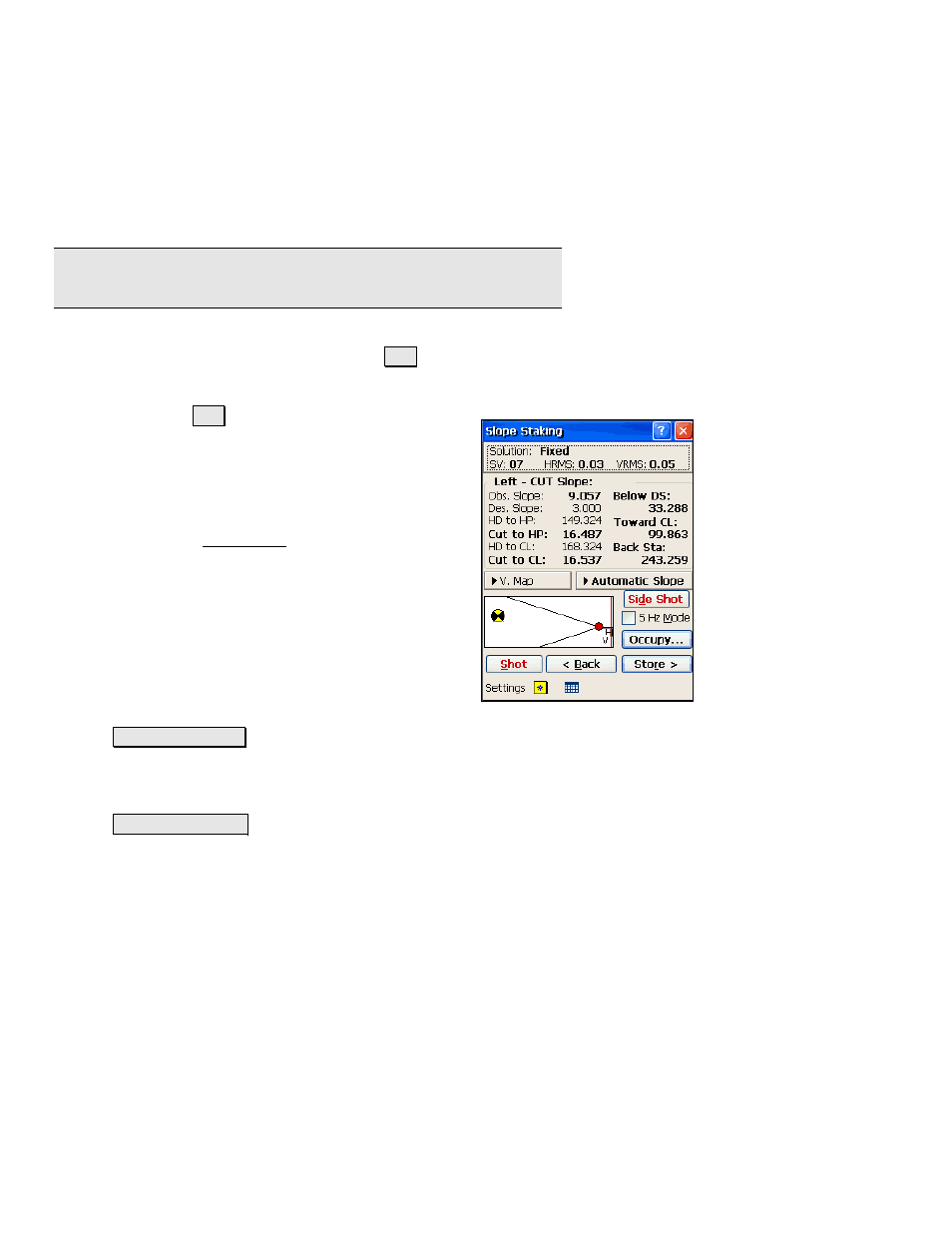
Slope Staking – Screen Four
The graphic portion of the
Horizontal Map
and
Vertical Map
is updated
continuously. This allows the user at the rover position to watch the
movement of the rover in relation to the slope and easily position the
rod over the catch point.
Note: You can tap in the graphic portion of the screen to open the
graphic in a larger window.
Although the graphic portion of the screen is continuously updated,
the numeric values are not updated until the
6KRW button is tapped.
The correct procedure for slope staking in GPS mode is to use the
graphic portion of the screen to locate the catch point as closely as
possible and press
6KRW. Once the position is
satisfactory, you can determine if the rover needs to be
moved again.
GPS Status
: displays the current solution type, the
number of satellites used, and the horizontal and vertical
precision computed by the receiver. Tap on this button
to open the detailed GPS Status screens (Page R-20).
5 Hz Mode
: switches the receiver from one Hz to five Hz
mode. When this box is checked, the receiver will
compute positions five times a second so the display will
update in near real time while you are roving to the
point.
The first button selects the type of slope that will be used
between the catch point and hinge point from the
following options:
•
$XWRPDWLF 6ORSH : selects the slope based on the current
rover position. If the rover is above the hinge point, a cut
slope is computed. If the rover is below the hinge point, a fill
slope is computed.
•
)RUFH &87 6ORSH : forces all computations to be based on a
cut slope.