Maple Systems MAPware-7000 User Manual
Page 156
MAPware-7000 Ladder Logic Guide
148
1010-1041 rev. 00
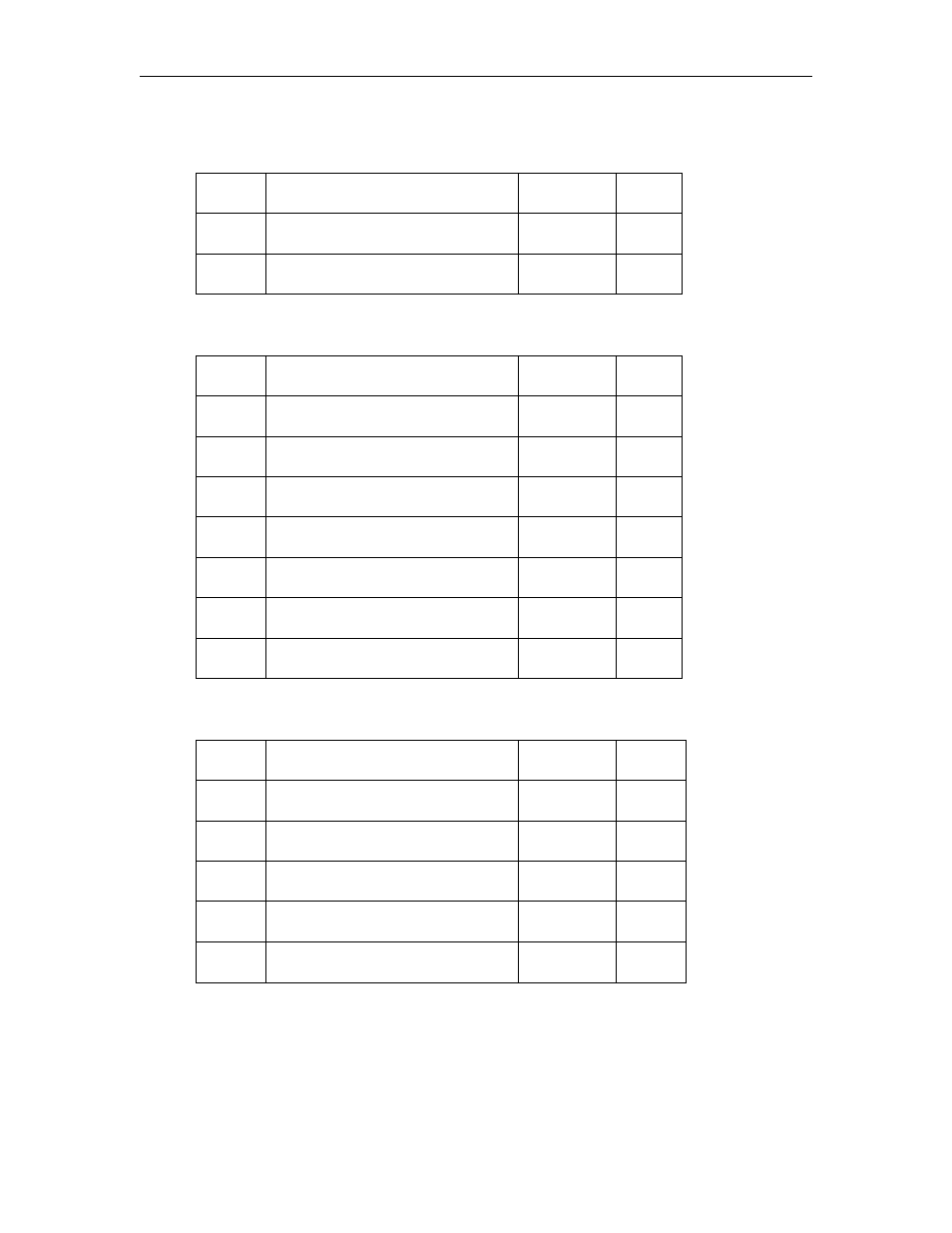
Operand A
Offset
Parameter
Register
Value
A
Present Value
D12
25
A+1
Setpoint Value
D13
100
Operand B
Offset
Parameter
Register
Value
B
Proportional Coefficient
D14
1
B+1
Integral Gain Constant High
D15
4
B+2
Integral Gain Constant Low
D16
10
B+3
Derivative Gain Constant Low
D17
20
B+4
Derivative Gain Constant High
D18
5
B+5
Gap Constant
D19
0
B+6
Limit Constant
D20
100
Operand C
Offset
Parameter
Register
Value
C
Manipulation Value
D21
0
C+1
Last deviation error
D22
78
C+2
Last Present Value
D23
22
C+3
2
nd
to last Present Value
D24
20
C+4
Remainder Value
D25
0
When the normally open contact B4 is ON, the PID1 calculation is performed based upon the
formula given above and the values entered into the registers. The results are stored in the five
consecutive registers as specified by Operand C.