IAI America PCON-CFA User Manual
Page 235
5. Flow and Commands of Basic MECHA
TROLINK Communication
229
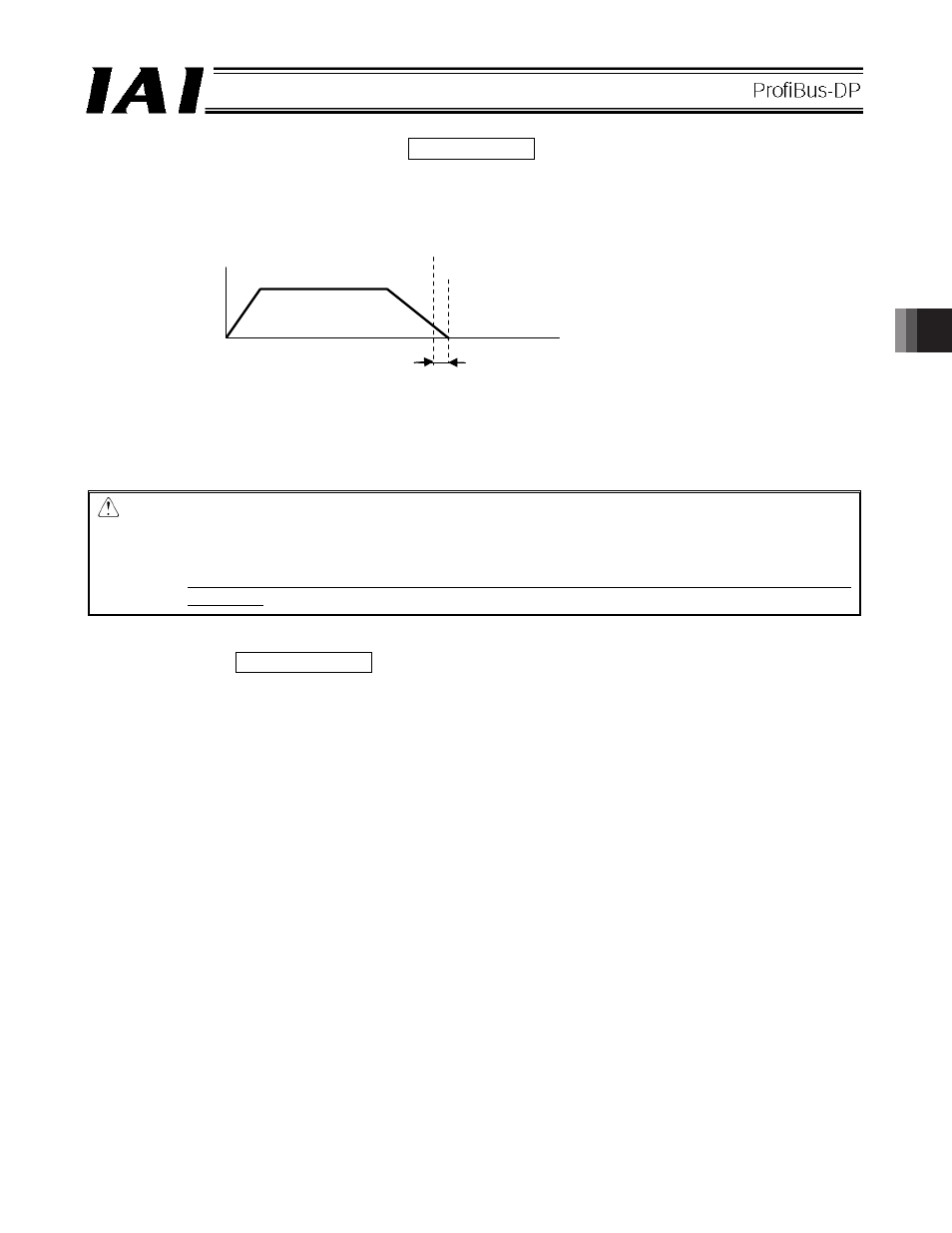
(10) Positioning complete signal (PEND) PLC input signal
This signal turns ON when the actuator has moved to the target position and entered the positioning band or
completed the push motion.
When the servo turns from OFF to ON, positioning is performed based on the current position being the target
position. As a result, this signal turns ON and will turn OFF when another positioning operation is started
subsequently using the home return (HOME) signal, positioning start (DSTR) signal or positioning command
(CSTR) signal.
Caution: If the servo turns OFF or an emergency stop is actuated while the actuator is standing still at the
target position, the PEND signal turns OFF.
When the servo turns ON again, the signal will turn ON if the actuator is inside the positioning
band.
The PEND signal will not turn ON if the CSTR or DSTR signal is ON, even after the positioning is
completed.
(11) Pause (STP) PLC output signal
When this signal is turned ON, the moving axis will decelerate to a stop. Turning it OFF will resume the axis
movement.
The acceleration upon resumption of operation, and deceleration at stopping, conform to the
acceleration/deceleration set by the specified position number (*) in the position/simple direct mode, or to the
value of acceleration/deceleration (*) in the half direct mode.
In the full direct mode, the values of acceleration (*) and deceleration (*) are used.
(*) Refer to 5.4.1.
Speed
Travel
Timing at which the positioning
complete signal turns ON
Target position
Time
Positioning band