IAI America PCON-CFA User Manual
Page 173
5. Flow and Commands of Basic MECHA
TROLINK Communication
167
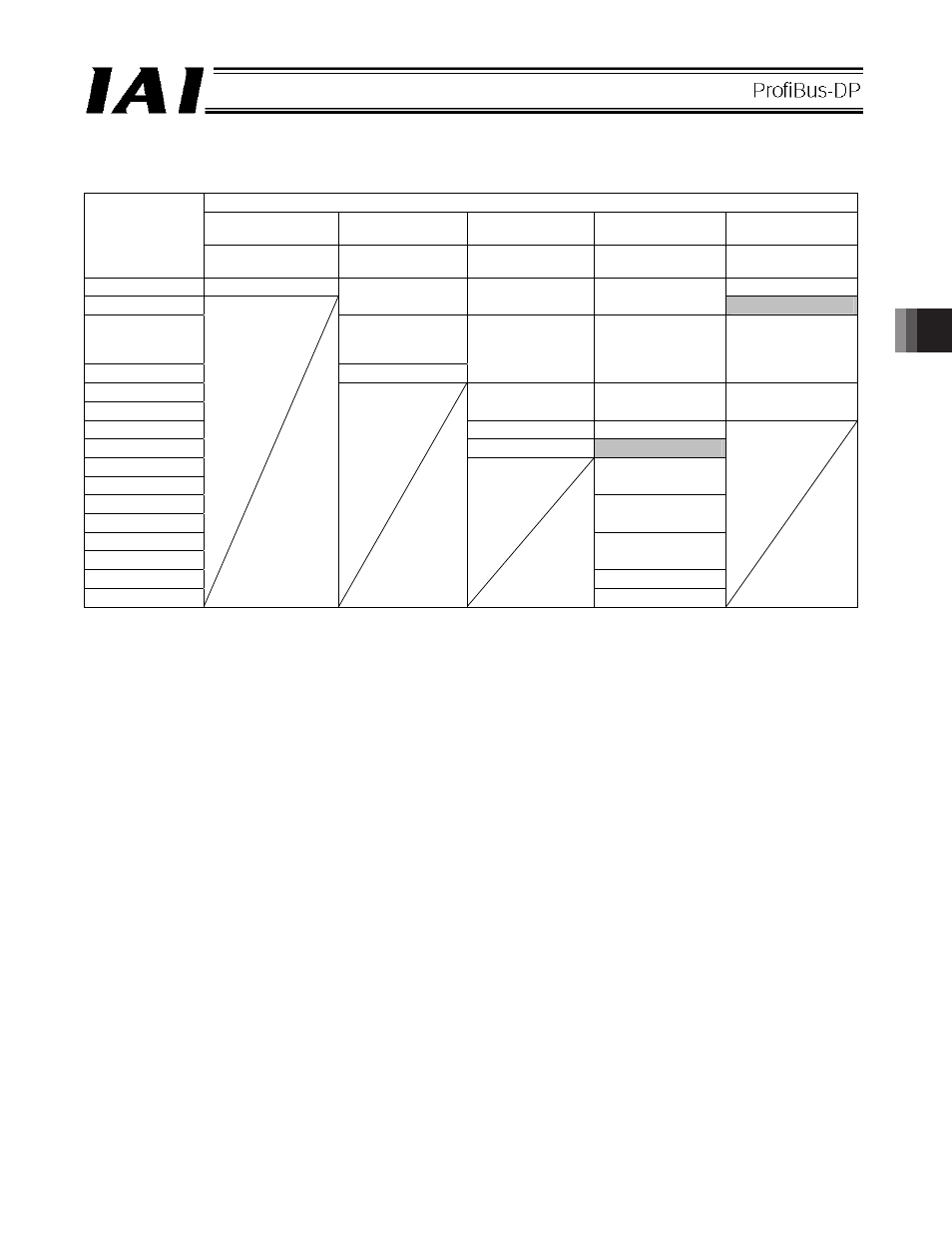
x SCON-CA
output
o PLC input (* n indicates the initial input address for each axis.)
SCON-CA DO and output data resister
Remote I/O mode
Position/simple
direct mode
Half direct mode
Full direct mode
Remote I/O mode 2
PLC input
address
(word address)
Number of occupied
bytes: 2
Number of
occupied bytes: 8
Number of
occupied bytes: 16
Number of
occupied bytes: 32
Number of
occupied bytes: 12
n
Port number 0 to 15
Port number 0 to 15
n+1
Current position
Current position
Current position
Occupied area
n+2
Completed position
number (simple
alarm ID
n+3
Status signal
Command current
Command current
Current position
n+4
n+5
Current speed
Current speed Command
current
n+6
Alarm code
Alarm code
n+7
Status signal
Occupied area
n+8
n+9
Force feedback
data
n+10
n+11
Total moving
count
n+12
n+13
Total moving
distance
n+14
Status signal 1
n+15
Status signal 2
(Note) The “occupied area” is occupied according to the operation mode setting.
This area cannot be used for any other purpose. Also pay attention to use of duplicate addresses.