IAI America PCON-CFA User Manual
Page 212
5. Flow and Commands of Basic MECHA
TROLINK Communication
206
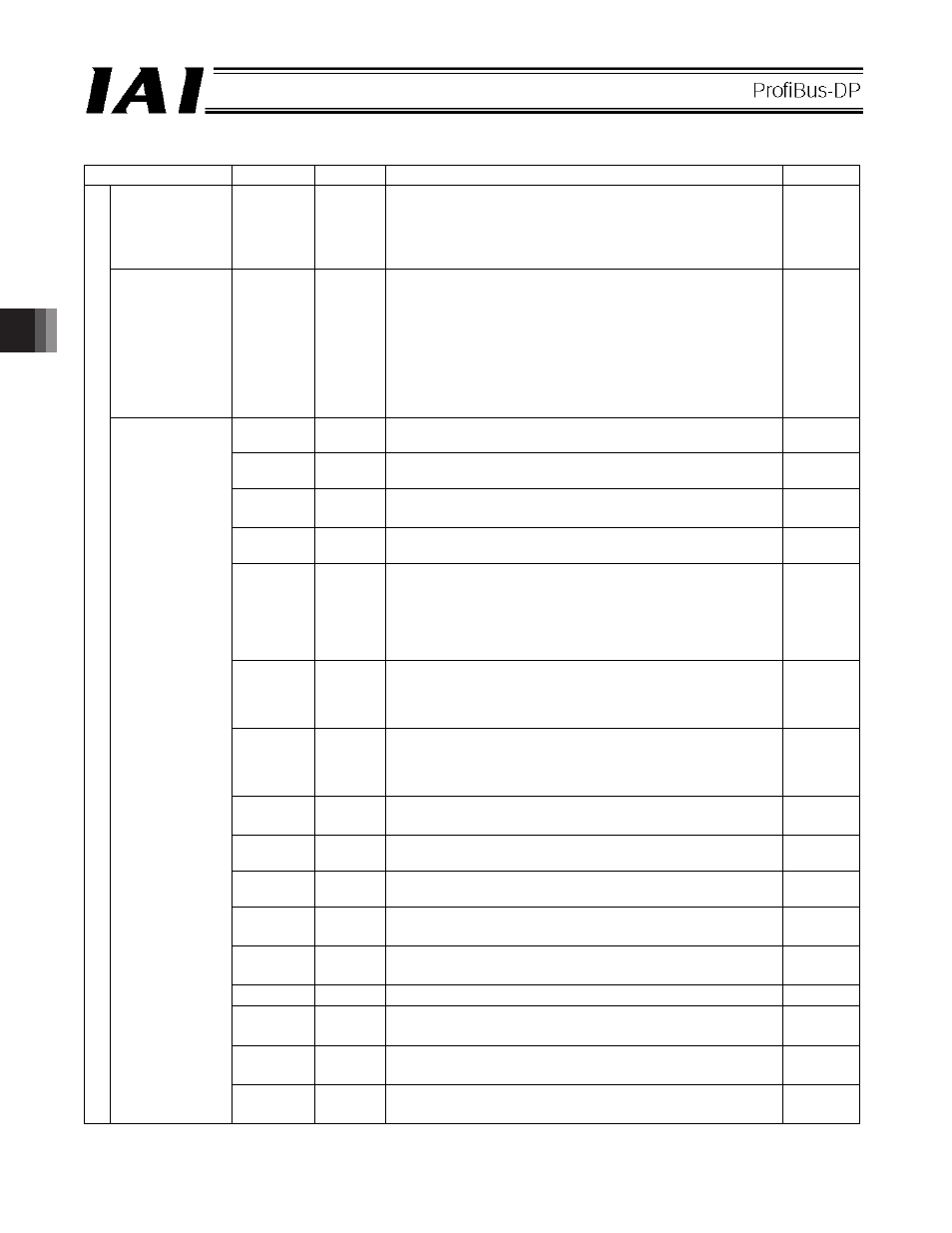
(* In the table, ON indicates that the applicable bit is “1,” while OFF indicates that the applicable bit is “0.”)
Signal type
Bit
Symbol
Description
Details
Current position
32 bit
-
32-bit signed integer indicating the current position.
The unit is 0.01 mm.
(Example) Reading: 000003FFH = 1023 (decimal) = 10.23 mm
* If this data is read as a hexadecimal, a negative value is
indicated by a 2’s complement.
5.9 (1)
Completed
position number
(simple alarm
code)
16 bit
PM1 ~
PM512
16-bit integer.
After the actuator has moved to the target position and entered
the positioning band, the position number corresponding to the
completed positioning is output.
“0” is output when no position movement has been performed
yet or while the actuator is moving.
If an alarm occurs (= the ALM status signal turns ON), a
corresponding simple alarm code (refer to the operation
manual for the controller) will be output.
5.9 (1)
b15 EMGS
Emergency stop: An emergency stop is being executed when
the signal is ON.
5.4.11 (2)
b14 PWR
Controller ready: The signal turns ON when the controller
becomes ready.
5.4.11 (1)
b13 CEND
Load cell calibration complete: This signal turns ON
when the load cell calibration is complete.
5.4.11 (32)
b12 ZONE1
Zone 1: The signal is ON when the current position is inside
the specified zone.
5.4.11 (12)
b11
PZONE/
ZONE2
PZONE and ZONE2 can be switched in Parameter No.149.
No.149 = 0
: This signal turns ON when the current
Position zone position is inside the specified position zone.
No.149 = 1
: This signal turns ON when the current
Zone2
position is inside the specified zone.
5.4.11 (12)
b10 LOAD
Load output judgment:
When this signal is ON, the specified load output judgment has
been reached. If the signal is OFF, it is not yet reached.
(For details, refer to the operation manual for your controller.)
5.4.11 (26)
b9 TRQS
Torque level:
When this signal is ON, the specified torque level has been
reached. If the signal is OFF, it is not yet reached.
(For details, refer to the operation manual for your controller.)
5.4.11 (27)
b8 RMDS
+JOG: The actuator moves in the direction opposite the
home when this signal turns ON.
5.4.11 (19)
b7 BALM
Absolute battery voltage low warning: This signal turns ON
when the voltage drops.
5.4.11 (28)
b6 PUSHS
Push-motion operation in progress: The signal is ON when the
Push-motion operation in progress.
5.4.11 (23)
b5 PSFL
Jog/inch switching: The actuator jogs when this signal is
OFF, and inches when it is ON.
5.4.11 (23)
b4 SV
Servo ON command: The servo turns ON when this
signal turns ON.
5.4.11 (5)
b3 ALM
Reset: A reset is executed when this signal turns ON.
5.4.11 (3)
b2 MOVE
Pause: A pause command is issued when this signal
turns ON.
5.4.11 (9)
b1 HEND
Home return: A home return command is issued when
this signal turns ON.
5.4.11 (6)
PLC in
put
Status signal
b0 PEND
Positioning command: A move command is issued when
this signal turns ON.
5.4.11 (10)