IAI America PCON-CFA User Manual
Page 123
4. SCON-CA
117
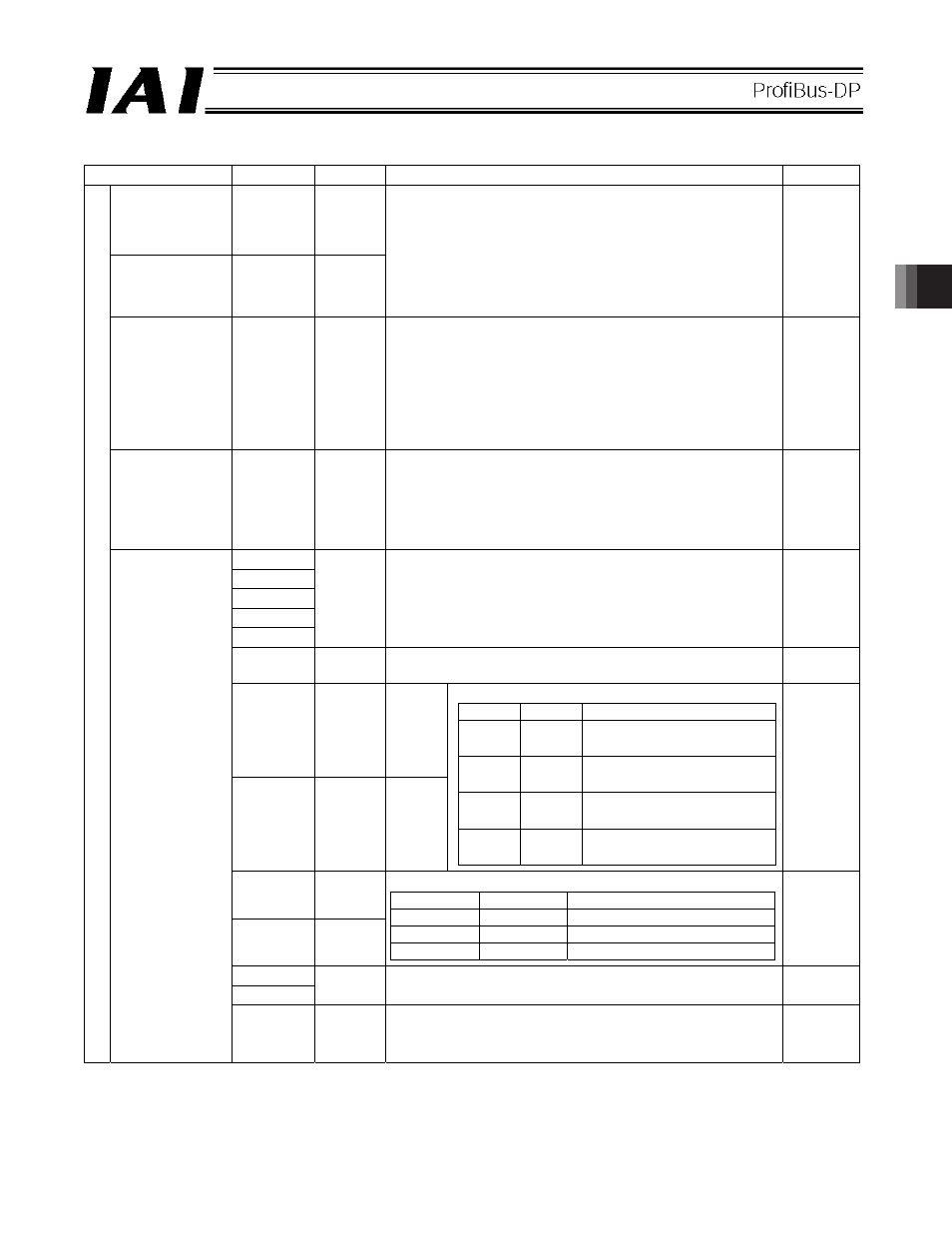
(* In the table, ON indicates that the applicable bit is “1,” while OFF indicates that the applicable bit is “0.”)
Address Bit
Symbol
Function
Details
Acceleration 16-bit
data -
Deceleration 16-bit
data -
16-bit integer.
Specify the acceleration and deceleration at which to move the
actuator.
The unit is 0.01 G, while the specifiable range is 1 to 300.
(Example) To set 0.30 G, specify “30.”
If a move command is issued by specifying “0” or a value
exceeding the maximum acceleration or maximum
deceleration, an alarm will occur.
4.6 (3)
Push-current
limiting value
16-bit data
-
16-bit integer.
Specify the current-limiting value during push-motion
operation.
The specified range is 0 (0%) to 255 (100%).
The actual specifiable range varies with each actuator. (Refer
to the catalog or operation manual for each actuator.)
If a move command is issued by specifying a value exceeding
the maximum push current value, an alarm will occur.
4.6 (3)
Load current
threshold
16-bit data
-
16-bit integer.
If judgment will be made as to whether or not the load current
exceeded the set value, specify the threshold value for current
using this register.
The specifiable range is 0 (0%) to 255 (100%).
If judgment is not performed, enter “0.”
4.6 (3)
b15
b14
b13
b12
b11
-
Cannot be used.
-
b10 SMOD
Standstill control mode: When the signal is ON, servo control is
performed at in a standstill state.
4.4.7 (28)
b9 ASO1
Stop
Mode 1
b8 ASO0
Stop
Mode 0
Select stop mode while standing by
ASO1
ASO0
Functions
OFF OFF
Disable
(Servo is ON at all times)
OFF ON
Sever turns OFF in time set
in Parameter No. 36
ON OFF
Sever turns OFF in time set
in Parameter No. 37
ON ON
Sever turns OFF in time set
in Parameter No. 38
4.4.7(30)
b7 MOD1
b6 MOD0
Acceleration/deceleration mode:
MOD1 MOD0
Function
OFF OFF Trapezoid
pattern
OFF ON S-motion
ON
OFF
primary delay filter
4.4.7 (29)
b5
b4
-
Cannot be used.
-
PLC output
Control signal 1
b3 INC
Incremental specification:
Absolute position command when the signal is OFF, or
incremental position command when the signal is ON.
4.4.7 (24)