Servo tuning example – Parker Hannifin 88-021610-01G User Manual
Page 86
Parker Hannifin
86 Aries User Guide
Servo Tuning Example
The example below illustrates how to experimentally obtain the highest
possible proportional feedback (
) and velocity feedback (
) gains. For
a Servo Tuning flow diagram, see “Appendix A Additional Specifications” on
page
The motion command used for this example is a step command with a step
size of 200. The plots shown are as they appear in the Aries Support Tool
(X axis = time, Y axis = position).
Note:
The steps shown below (steps 1 to 11) represent the major steps of
the process; the actual progression between these steps may require several
iterations.
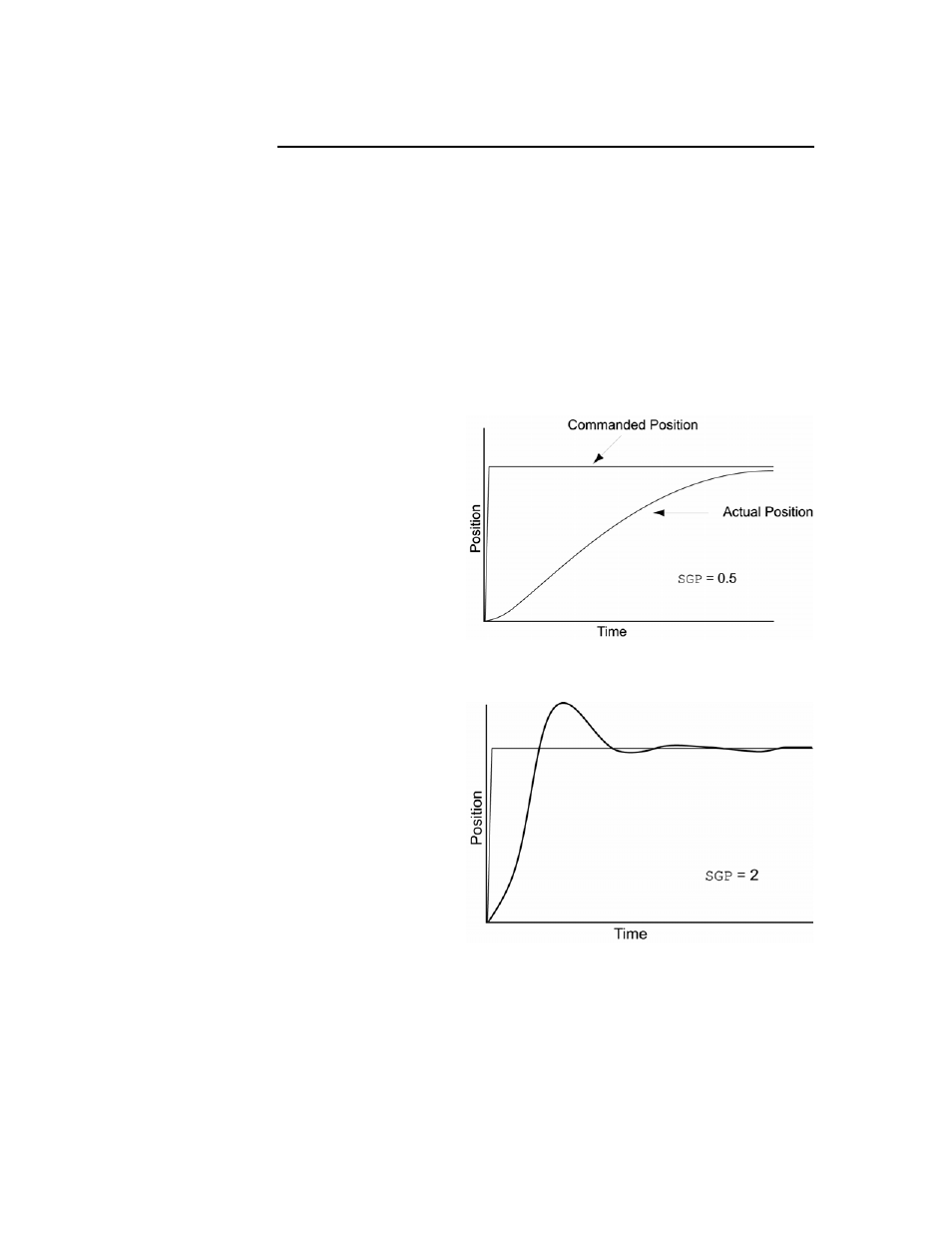
Step 1
For a starting trial, we set
the proportional feedback
gain (
) to .5. As you
can see by the plot, the
response is slow.
In the next step, we should
increase SGP until the
response is slightly under
damped.
Step 2
With SGP equal to 2, the
response becomes slightly
under damped (see plot).
Therefore, we should
introduce the velocity
feedback gain (
) to
damp out the oscillation.