Table 24, Motor feedback, Connector pinout – Parker Hannifin 88-021610-01G User Manual
Page 63
Parker Hannifin
Chapter 3 Electrical Installation 63
Pinout—
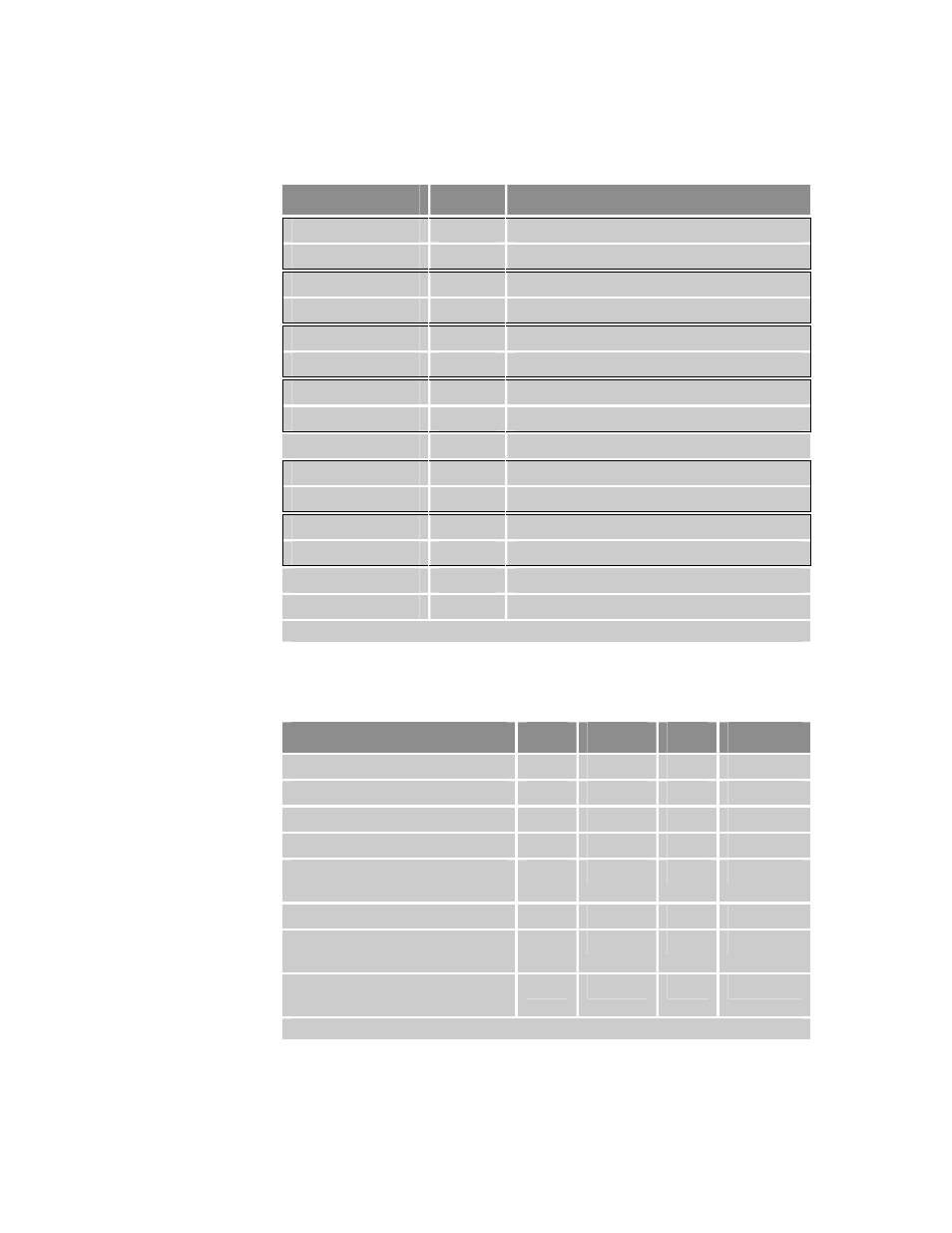
MOTOR FEEDBACK
Connector
Note:
A box surrounding pins indicates a requirement for twisted pair wiring.
Signal
Pin
Description
ENC Z+ / Data+
1
Encoder Z Channel in
ENC Z– / Data–
2
Encoder Z Channel in
DGND
3
Encoder power return
+5 VDC
4
+5 VDC Encoder power
+5 VDC
5
+5 VDC Hall power
DGND
6
Hall power return
ENC A– / SIN–
7
Encoder A Channel in
ENC A+ / SIN+
8
Encoder A Channel in
Hall 1 / SCLK+ *
9
Hall 1 input
Thermal+
10
Motor thermal switch/thermistor
Thermal–
15
Motor thermal switch/thermistor
ENC B / COS–
11
Encoder B Channel in
ENC B+ / COS+
12
Encoder B Channel in
Hall 2 / SCLK– *
13
Hall 2 input
Hall 3
14
Hall 3 input
*
When using the SinCos protocol, pins 9 and 13 require twisted pair wiring.
Table 24
MOTOR FEEDBACK
Connector Pinout
Inputs—Encoder
Description
Min
Typical
Max
Units
Common Mode Range
-7
+7
V
Current—Encoder
250
mA
Current—Hall
250
mA
Differential Threshold Voltage
-200
+200
mV
Differential Termination
Impedance
120
ohms
Thermal Switch Current
2
mA
Thermal Switch Voltage
Maximum (supplied)
15
V
Input Frequency
(pre-quadrature)
5
MHz
Note:
All parameters are at the connector pin.
Table 25 Inputs—Encoder Inputs Electrical/Timing Characteristics