Table 38 position response types, Performance measurements – Parker Hannifin 88-021610-01G User Manual
Page 82
Parker Hannifin
82 Aries User Guide
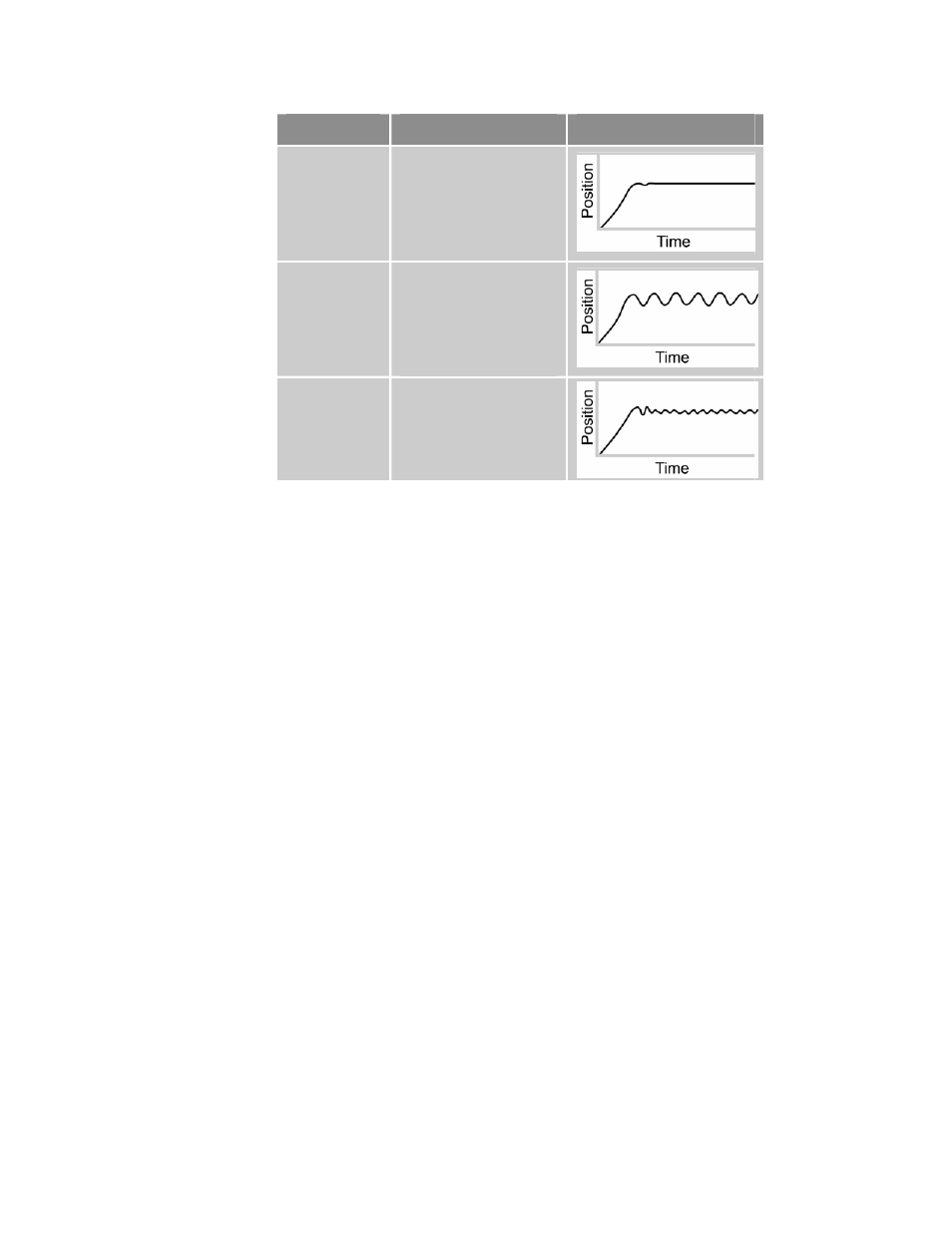
Response
Description
Profile (position/time)
Critically
damped
A critically-damped
response is the most
desirable because it
optimizes the trade-off
between damping and
speed of response.
Oscillatory
An oscillatory
response is
characterized by a
sustained position
oscillation of equal
amplitude.
Chattering
Chattering is a high-
frequency, low-
amplitude oscillation
that is usually audible.
Table 38 Position Response Types
Performance Measurements
If you plot of the position response versus time, you can make a few
measurements to quantitatively assess the performance of the servo. These
three measurements are made before or shortly after the motor stops
moving:
• Overshoot—The measurement of the maximum magnitude that the
actual position exceeds the position setpoint. It is usually measured
in terms of the percentage of the setpoint value.
• Rise Time—The time it takes the actual position to pass the
setpoint.
• Settling Time—The time between when the commanded position
reaches the setpoint and the actual position settles within a certain
percentage of the position setpoint. (Note the settling time definition
here is different from that of a control engineering text book, but the
goal of the performance measurement is still intact.).