Controlling integral windup – Parker Hannifin 88-021610-01G User Manual
Page 84
Parker Hannifin
84 Aries User Guide
Controlling Integral Windup
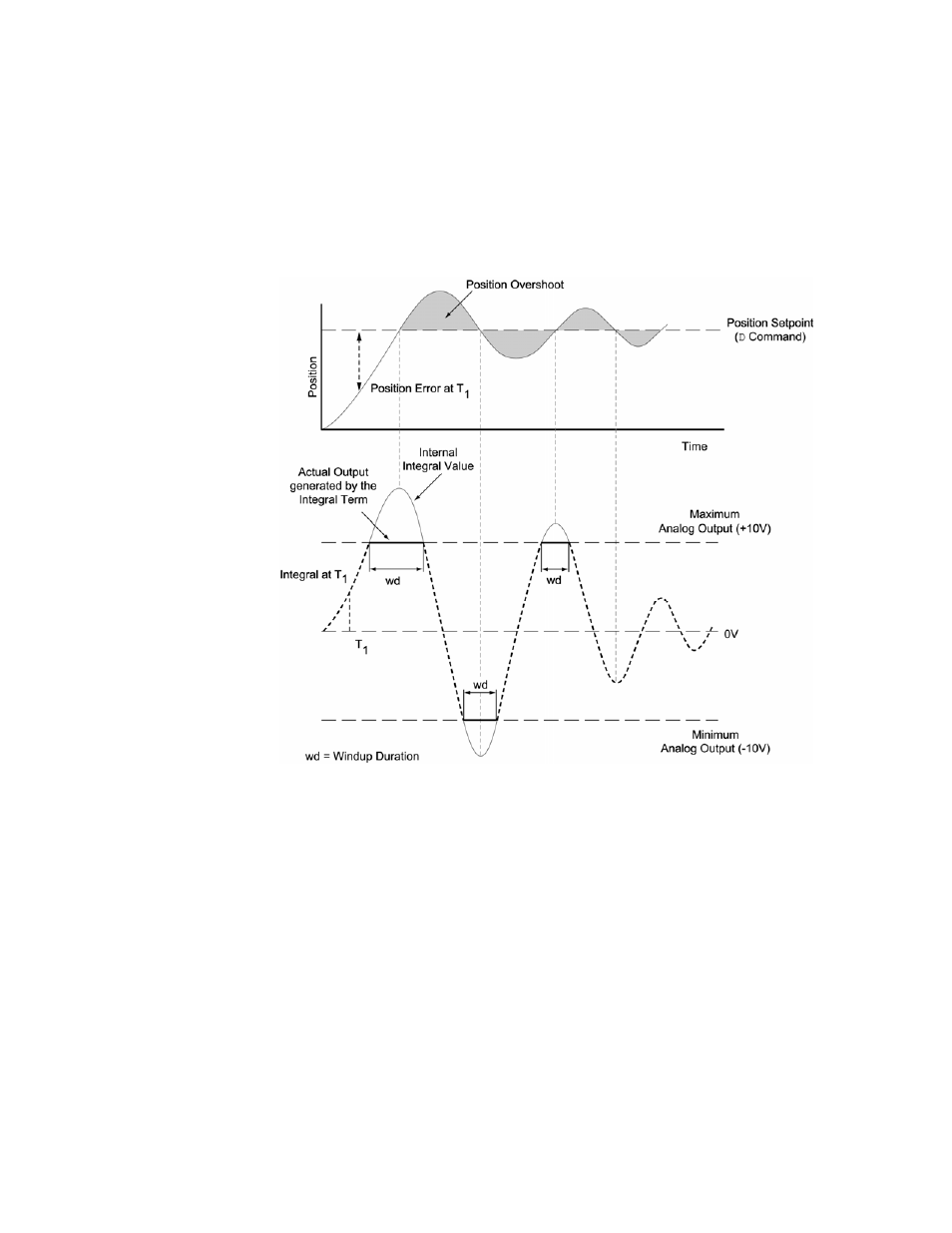
If you are using integral control (SGI) and there is an appreciable position
error that persists long enough during the transient period (time taken to
reach the setpoint), the control signal generated by the integral action can
end up too high; this saturates to the maximum level of the controller's
analog control signal output. This phenomenon is called integrator windup
(see Figure 39).
Figure 39 Integrator Windup (Without Using SGILIM Command)
After windup occurs, it takes time before the integrator output returns to a
level within the limit of the controller's output. Such a delay causes excessive
position overshoot and oscillation.
The integral windup limit (SGILIM) command allows you to set the absolute
limit of the integral. The commanded limit, in essence, turns off the integral
action as soon as it reaches the limit; consequently, position overshoot and
oscillation can be reduced (see Figure 40).