Control interfaces, 3 timing charts – Parker Hannifin Dynaserv G2 User Manual
Page 82
6-8
Control Interfaces
6
6.4.3
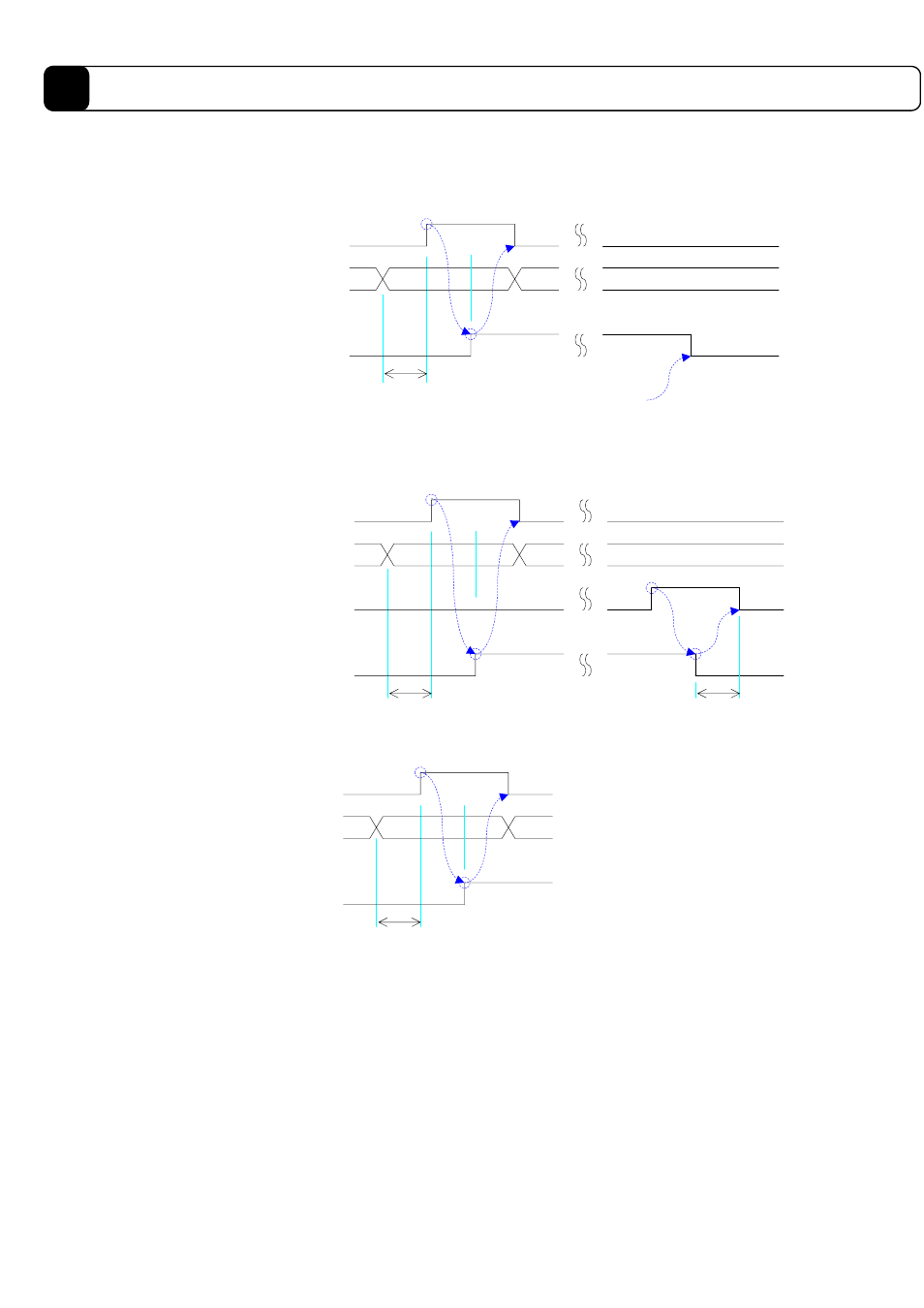
Timing Charts
[Self-end type]
In case of self-end
STATUS1
MODE_START
MODE[1..0]
STATUS0
BUSY
Not necessary
to consider
0 or more
At the end of
processing
STATUS1
STATUS0
Not necessary
to consider
Not necessary
to consider
[Self-end type]
In case of end by the operation abort command
[Non-self-end type]
MODE_ABORT
MODE_START
MODE[1..0]
BUSY
STATUS1
STATUS0
Not necessary
to consider
0 or more
STATUS1
STATUS0
Not necessary
to consider
Not necessary
to consider
0 or more
STATUS1
STATUS0
[Non-end type]
MODE_START
MODE[1..0]
BUSY
STATUS1
STATUS0
Not necessary
to consider
0 or more
STATUS1
STATUS0
Not necessary
to consider