2 operation functions, 1 jog move – Parker Hannifin Dynaserv G2 User Manual
Page 57
5-3
5.2
Operation Functions
Idle status
Controller interface position command follow-up
Jog move
Test operation
Operating status
Auto-tuning operation
Homing move
Mechanical setting mode
The status in which no operation is performed is called the idle status; jog moves can be performed in this
status. If no jog move is being performed in the idle status, the driver follows the position command from the
controller interface.
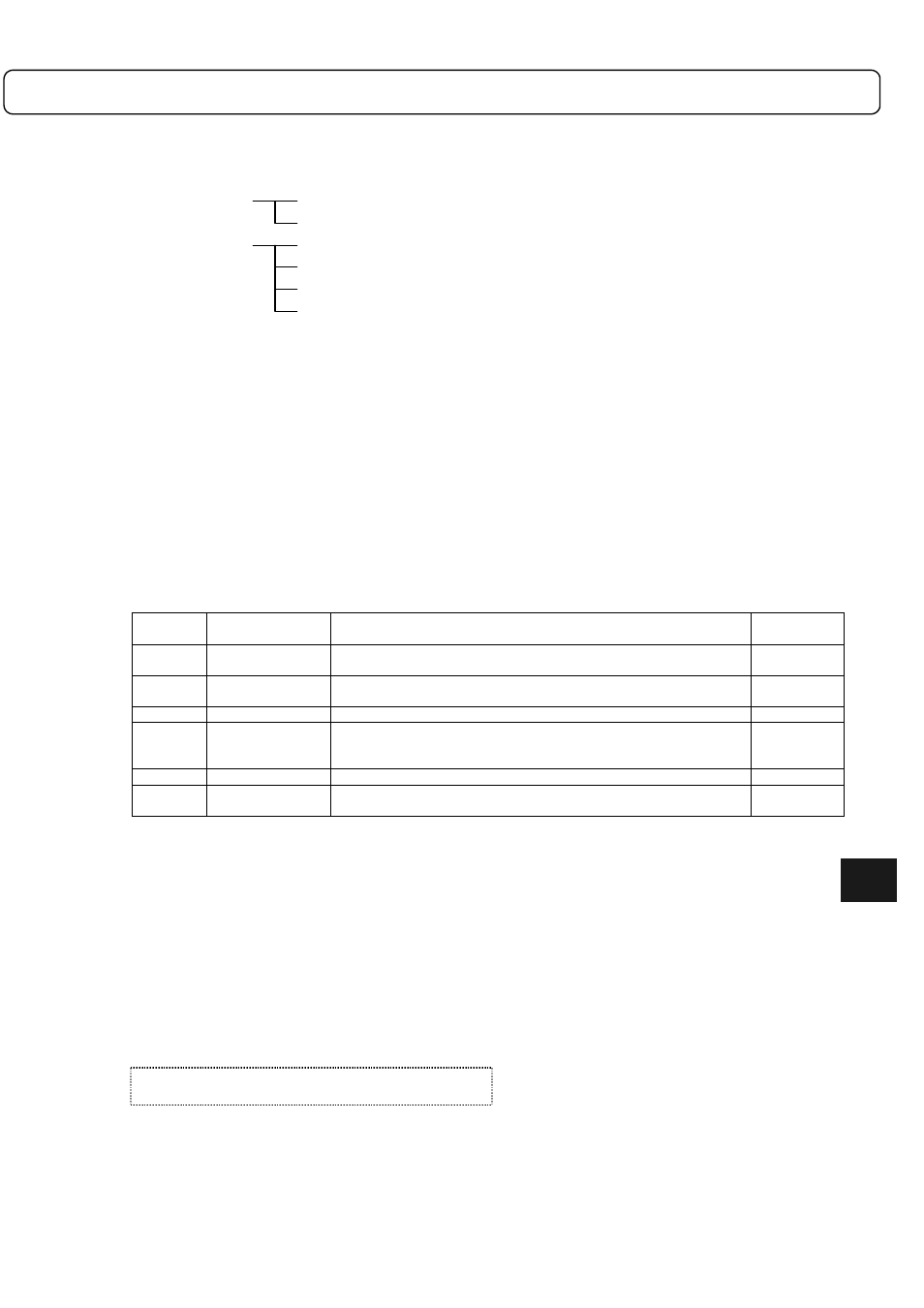
This driver is equipped with the operation functions listed below. Use them as needed.
The start, end, and stop actions of these operations can be controlled from either the controller interface side or
the RS232C interface side. Refer to the related chapters (Chapter 6, "Controller Interface" and Chapter 7,
"RS232C Interface") for operation methods.
The methods used to end each operation can be classified into three categories: the self-end type that ends
automatically when the operation is complete, the non-self-end type that cannot end the action by itself, and the
non-end type that cannot be stopped once started. An appropriate end or stop action must be performed for each
type.
Operation
No.
Name
Comment
Ending type
0
Test operation
Generates a 2.5Hz square wave position command signal for
adjustment of the control part.
Non-self-end
1
Auto-tuning
operation
Makes the rotor oscillate, measures load inertia and load mass, and
sets the parameters for the control part automatically.
Self-end
2
(Reserved)
3
Homing move
Finds the home position using the hardware over-travel signal,
homing sensor, and motor Zero signal to establish the coordinate
system.
Self-end
4 to 14
(Reserved)
15
Mechanical
setting mode
Special mode for changing mechanical setting parameters.
Non-end
5.2.1
Jog Move
The rotor can be moved in the positive (+) or negative (-) direction by issuing a jog move command while in idle
status.
There are three types of jog move commands: (+) direction move, (-) direction move, and stop. Refer to the
sections about the RS232C interface and PLC interface for how to issue a command.
The move can only be trapezoidal but it is possible to set the acceleration and deceleration profile. In addition,
the velocity override does function in real time. The velocity in the jog move is determined by the value in the
#10 Jog Velocity parameter.
If operation is started while the jog move is in progress, the operation is executed as soon as the jog move stops.
The settling wait function is not performed at the end of the jog move.
[Related parameter]
#10
Jog velocity
5