Communication functions – MITSUBISHI ELECTRIC MR-J2S- CP User Manual
Page 335
15 - 28
15. COMMUNICATION FUNCTIONS
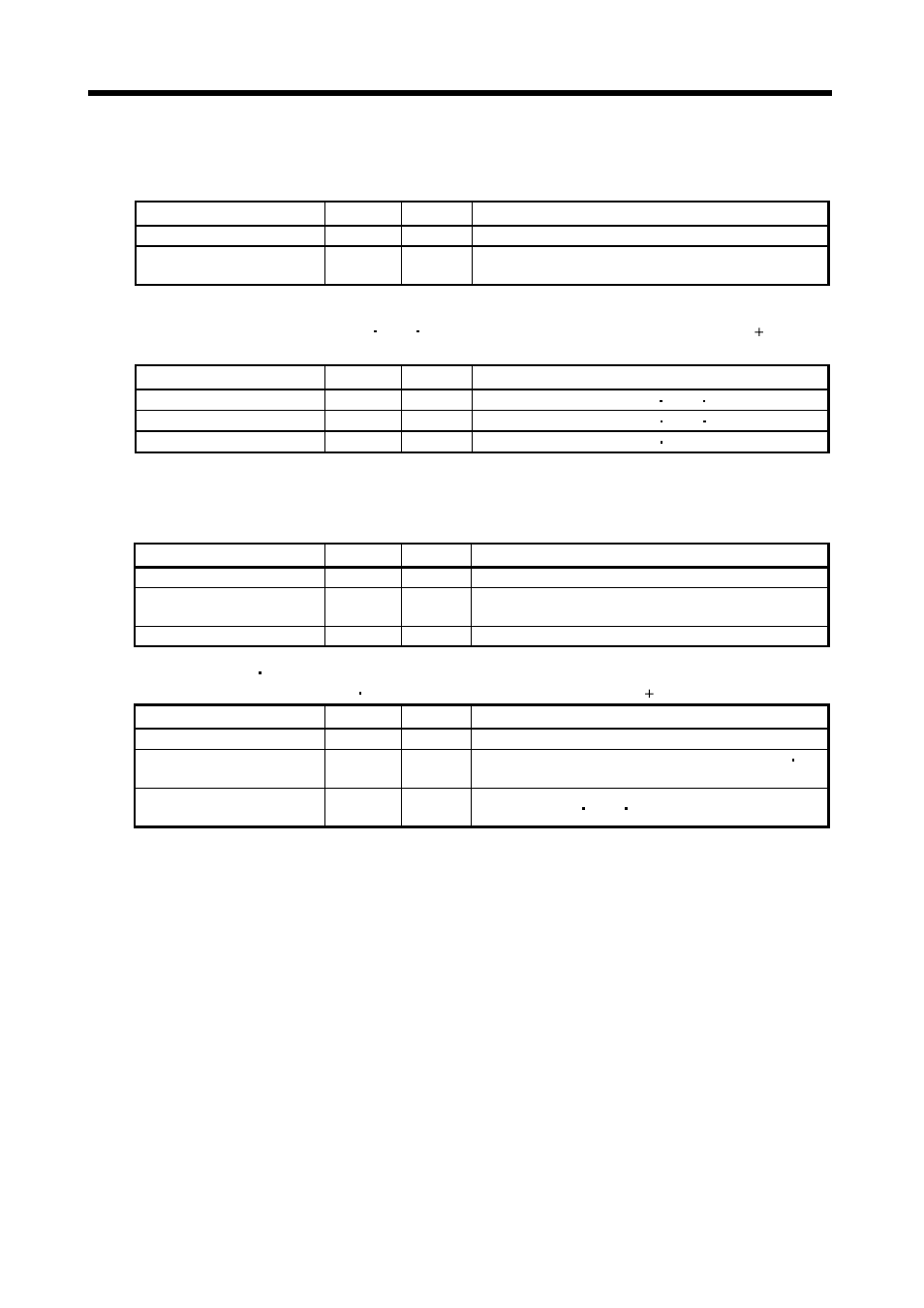
(2) Jog operation
Transmit the following communication commands.
(a) Setting of jog operation data
Item
Command Data No.
Data
Speed
[A][0]
[1][0] Write the speed [r/min] in hexadecimal.
Acceleration/deceleration
time constant
[A][0] [1][1]
Write the acceleration/deceleration time constant
[ms] in hexadecimal.
(b) Start
Turn on the input devices SON LSP LSN and ST1/ST2 by using command [9][2] data No.
[0][0].
Item
Command Data No.
Data
Forward rotation start
[9][2]
[0][0] 00000807: Turns on SON LSP LSN and ST1.
Reverse rotation start
[9][2]
[0][0] 00001007: Turns on SON LSP LSN and ST2.
Stop [9][2]
[0][0]
00000007: Turns on SON LSP and LSN.
(3) Positioning operation
Transmit the following communication commands.
(a) Setting of positioning operation data
Item
Command Data No.
Data
Speed
[A][0]
[1][0] Write the speed [r/min] in hexadecimal.
Acceleration/deceleration
time constant
[A][0] [1][1]
Write the acceleration/deceleration time constant
[ms] in hexadecimal.
Moving distance
[A][0]
[1][3] Write the moving distance [pulse] in hexadecimal.
(b) Input of servo-on stroke end
Turn on the input devices SON LSP and LSN by using command [9][2] data No. [0][0].
Item
Command Data No.
Data
Servo-on
[9][2]
[0][0] 00000001: Turns on SON.
Servo OFF
Stroke end ON
[9][2] [0][0]
00000006: Turns off SON and turns on LSP
LSN.
Servo-on
Stroke end OFF
[9][2] [0][0]
Turns
on
SON LSP LSN.