Parameters – MITSUBISHI ELECTRIC MR-J2S- CP User Manual
Page 154
5 - 17
5. PARAMETERS
Class No. Symbol
Name and Function
Initial
value
Unit
Setting
range
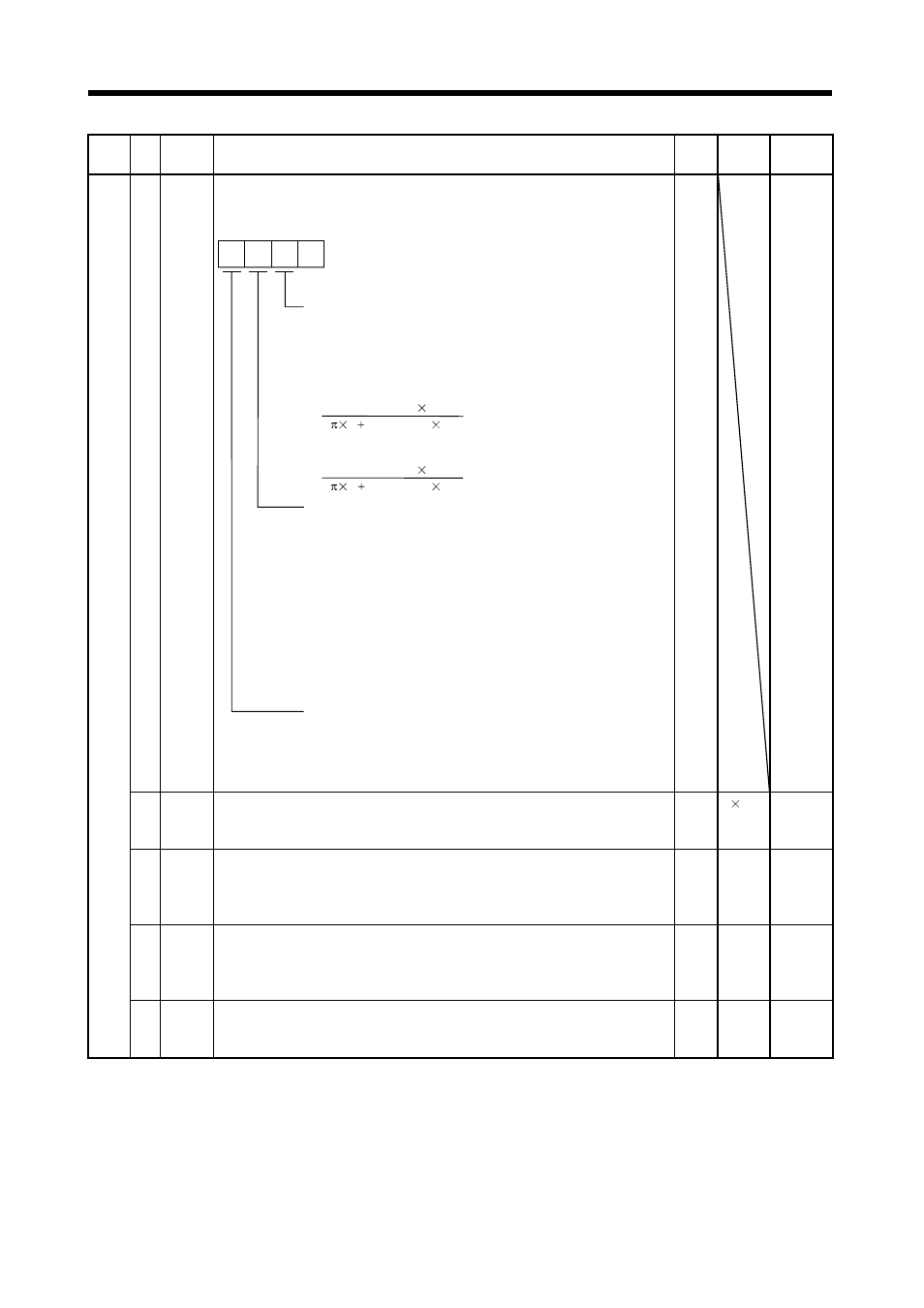
63
LPF Low-pass filter/adaptive vibration suppression control
Used to selection the low-pass filter and adaptive vibration suppression
control. (Refer to chapter 9)
0
Low-pass filter selection
0: Valid (Automatic adjustment)
1: Invalid
Adaptive vibration suppression control selection
Choosing "valid" or "held" in adaptive vibration
suppression control selection makes the machine
resonance control filter 1 (parameter No. 61) invalid.
0: Invalid
1: Valid
Machine resonance frequency is always detected
and the filter is generated in response to resonance
to suppress machine vibration.
2: Held
The characteristics of the filter generated so far are held,
and detection of machine resonance is stopped.
Adaptive vibration suppression control sensitivity selection
Used to set the sensitivity of machine resonance detection.
0: Normal
1: Large sensitivity
When you choose "valid", the filter of the handwidth
represented by the following expression is set automatically.
2 (1 GD2 setting 0.1)
VG2 setting 10
For 1kW or less
2 (1 GD2 setting 0.1)
VG2 setting 5
For 2kW or more
[H
z
]
[H
z
]
0000
Refer to
Name
and
function
column.
64 GD2B Ratio of load inertia moment to servo motor inertia moment 2
Used to set the ratio of load inertia moment to servo motor inertia moment
when gain changing is valid.
70
0.1
times
0 to 3000
65 PG2B Position control gain 2 changing ratio
Used to set the ratio of changing the position control gain 2 when gain
changing is valid.
Made valid when auto tuning is invalid.
100 % 10
to
200
66 VG2B Speed control gain 2 changing ratio
Used to set the ratio of changing the speed control gain 2 when gain changing
is valid.
Made valid when auto tuning is invalid.
100 % 10
to
200
E
xpa
n
si
on
pa
ra
m
et
ers
2
67
VICB Speed integral compensation changing ratio
Used to set the ratio of changing the speed integral compensation when gain
changing is valid. Made valid when auto tuning is invalid.
100 % 50
to
1000