B.1 parameter table – Yaskawa J1000 Compact Vector Control Drive User Manual
Page 178
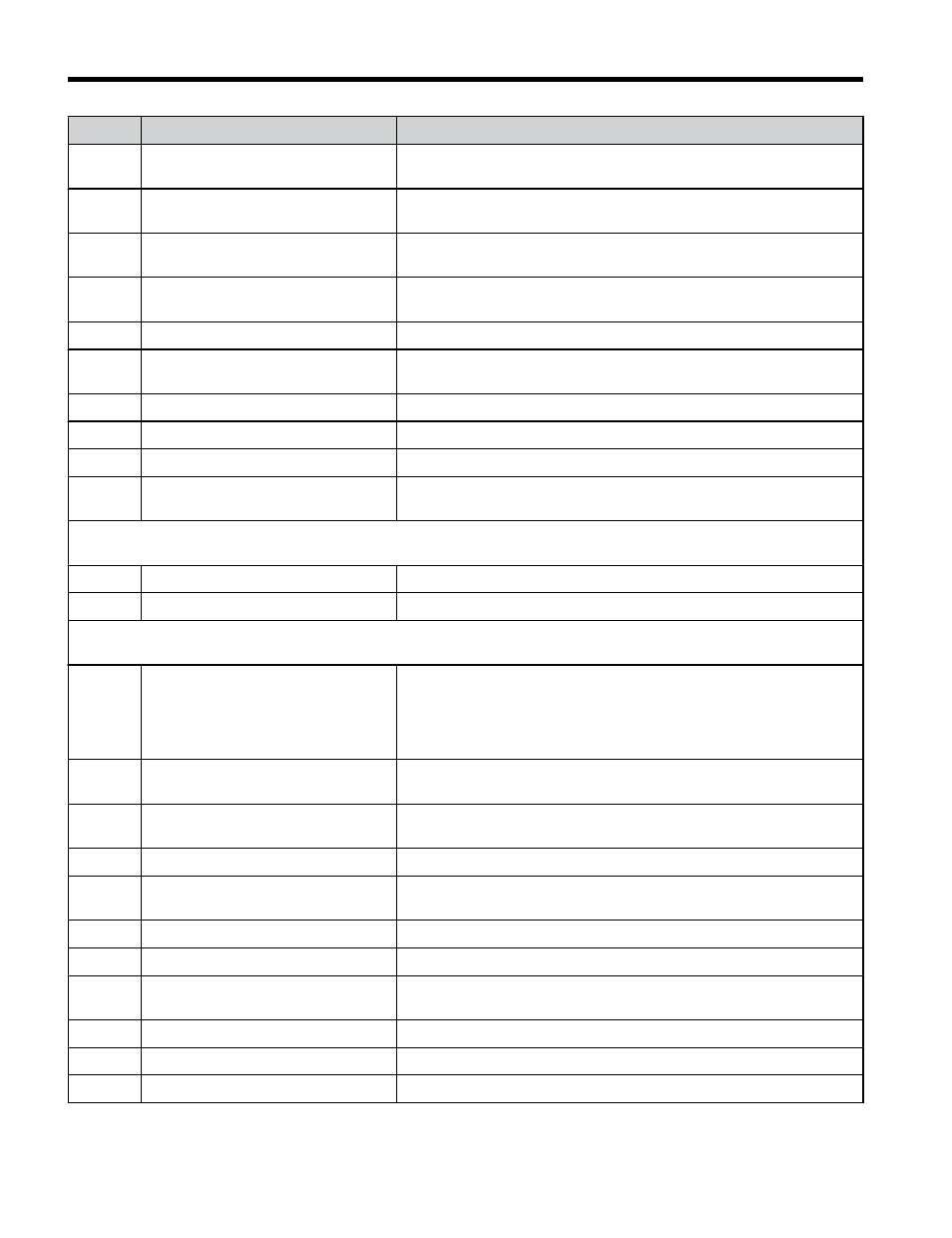
No.
Name
Description
b3-06
Output Current 1 during Speed
Search
Refer to V1000 Technical Manual for details.
b3-08
Current Control Gain during Speed
Search (Speed Estimation Type)
Refer to V1000 Technical Manual for details.
Note: Available in drive software versions PRG: 1022 and later.
b3-10
Speed Search Detection
Compensation Gain
Refer to V1000 Technical Manual for details.
b3-14
Bi-Directional Speed Search
Selection
Refer to V1000 Technical Manual for details.
b3-17
Speed Search Restart Current Level Refer to V1000 Technical Manual for details.
b3-18
Speed Search Restart Detection
Time
Refer to V1000 Technical Manual for details.
b3-19
Number of Speed Search Restarts
Refer to V1000 Technical Manual for details.
b3-24
Speed Search Method Selection
Refer to V1000 Technical Manual for details.
b3-25
Speed Search Retry Interval Time
Refer to V1000 Technical Manual for details.
b3-29
Speed Search Induced Voltage Level Refer to V1000 Technical Manual for details.
Note: Available in drive software versions PRG: 1020 and later.
b4: Timer Function
Use b4 parameters to configure timer function operation.
b4-01
Timer Function On-Delay Time
Refer to V1000 Technical Manual for details.
b4-02
Timer Function Off-Delay Time
Refer to V1000 Technical Manual for details.
b5: PID Control
Use b5 parameters to configure the PID control drive function.
b5-01
PID Function Setting
0: Disabled
1: Enable (Deviation is D-controlled)
2: Enable (Feedback is D-controlled)
3: Enable (Deviation is D-controlled, PID output added to Freq. Ref.)
4: Enable (Feedback is D-controlled, PID output added to Freq. Ref.)
b5-02
Proportional Gain Setting (P)
Sets the proportional gain of the PID controller. A setting of 0.00
disables P control.
b5-03
Integral Time Setting (I)
Sets the integral time for the PID controller. A setting of 0.0 s disables
integral control.
b5-04
Integral Limit Setting
Sets the maximum output possible from the integrator.
b5-05
Derivative Time (D)
Sets D control derivative time. A setting of 0.00 s disables derivative
control.
b5-06
PID Output Limit
Refer to V1000 Technical Manual for details.
b5-07
PID Offset Adjustment
Applies an offset to the PID controller output.
b5-08
PID Primary Delay Time Constant Sets the amount of time for the filter on the output of the PID
controller.
b5-09
PID Output Level Selection
Refer to V1000 Technical Manual for details.
b5-10
PID Output Gain Setting
Sets the gain applied to the PID output.
b5-11
PID Output Reverse Selection
Refer to V1000 Technical Manual for details.
B.1 Parameter Table
178
YASKAWA ELECTRIC TOEP C710606 47C YASKAWA AC Drive – V1000 Quick Start Guide