System controller mode, System controller, not active controller mode – Measurement Computing Personal488 rev.3.0 For DOS & Windows 3.Xi User Manual
Page 133
8N. Operating Modes
II. SOFTWARE GUIDES - 8. Driver488/DRV
II-118
Personal488 User’s Manual, Rev. 3.0
The bottom half of the state diagram shows the two operating states of a Not System Controller device.
At power on, it is a Peripheral to the System Controller which is the Active Controller. If it receives
control from the Active Controller, it becomes the new Active Controller. Even though it is the Active
Controller, it is still not the System Controller. The System Controller can force the Active Controller
to give up control by asserting Interface Clear. The Active Controller can also give up control by
passing control to another device, which may or may not be the System Controller.
In summary, a bus device is set in hardware as either the sole System Controller in the system, or as a
non-System Controller. At power on, the System Controller is the Active Controller, and the other
devices are Peripherals. The System Controller can give up control by Passing Control, and can regain
control by asserting Interface Clear, or by receiving control. A Peripheral can become the Active
Controller by receiving control, and can give up control by passing control, or on detecting Interface
Clear.
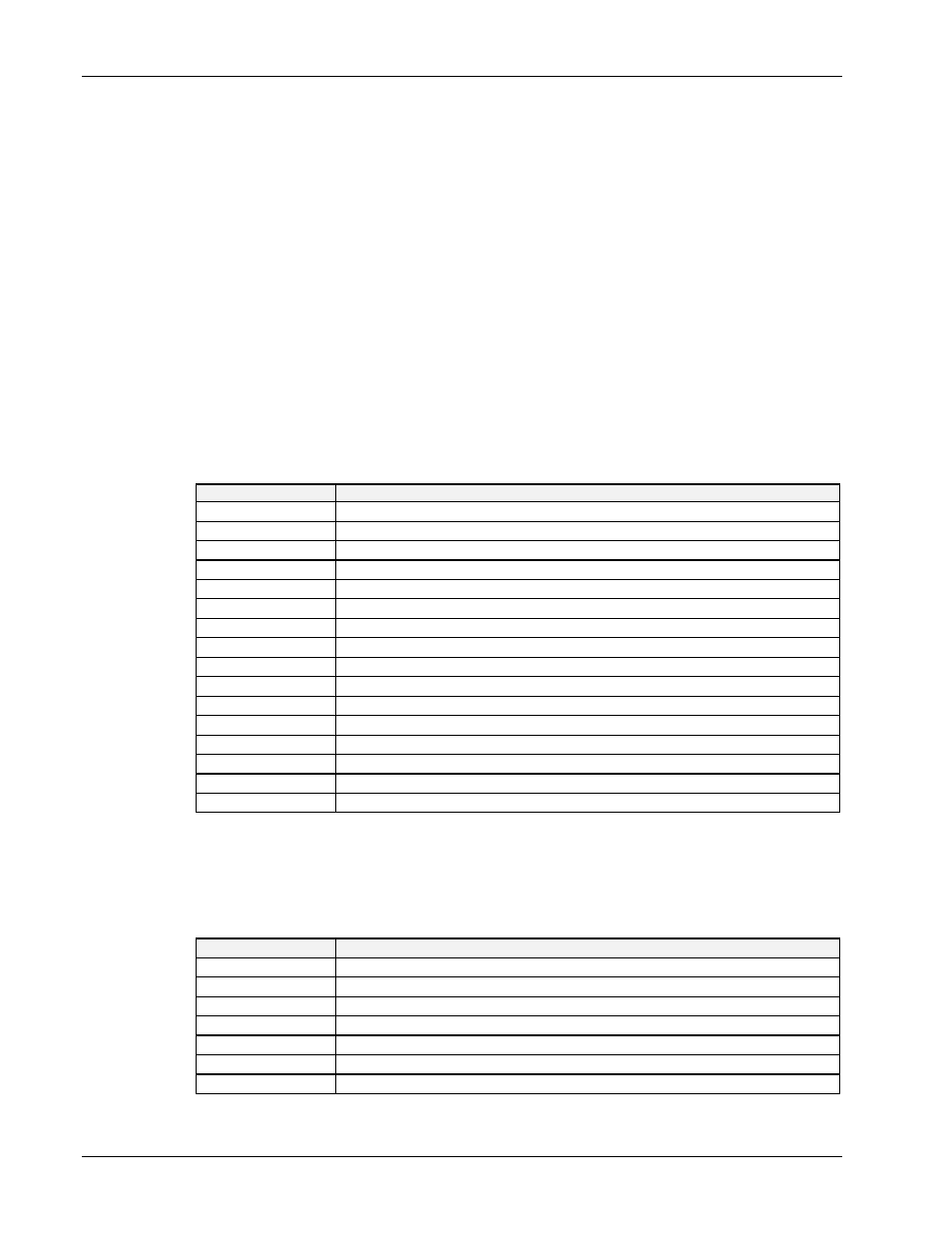
System Controller Mode
The most common Driver488/DRV configuration is as the System Controller, controlling several IEEE
488 bus instruments. In this mode, Driver488/DRV can perform all the various IEEE 488 bus
protocols necessary to control and communicate with any IEEE 488 bus devices. As the System
Controller in the Active Controller mode, Driver488/DRV can use all the commands available for the
Active Controller state, plus control the Interface Clear and Remote Enable lines. The available bus
commands and their actions are:
Command
Action
ABORT
Pulse Interface Clear.
LOCAL
Unassert Remote Enable, or send Go To Local to selected devices.
REMOTE
Assert Remote Enable, optionally setting devices to Remote.
LOCAL LOCKOUT
Prevent local (front-panel) control of bus devices.
CLEAR
Clear all or selected devices.
TRIGGER
Trigger selected devices.
ENTER
Receive data from a bus device.
OUTPUT
Send data to bus devices.
PASS CONTROL
Give up control to another device which becomes the Active Controller.
SPOLL
Serial Poll a bus device, or check the Service Request state.
PPOLL
Parallel Poll the bus.
PPOLL CONFIG
Configure Parallel Poll responses.
PPOLL DISABLE
Disable the Parallel Poll response of selected bus devices.
PPOLL UNCONFIG
Disable the Parallel Poll response of all bus devices
SEND
Send low-level bus sequences.
RESUME
Unassert Attention. Use to allow Peripheral-to-Peripheral transfers.
System Controller, Not Active Controller Mode
After passing control to another device, the System Controller is no longer the Active Controller. It
acts as a Peripheral to the new Active Controller, and the allowed bus commands and their actions are
modified accordingly. However, it still maintains control of the Interface Clear and Remote Enable
lines. The available bus commands and their actions are:
Command
Action
ABORT
Pulse Interface Clear.
LOCAL
Unassert Remote Enable.
REMOTE
Assert Remote Enable.
ENTER
Receive data from a bus device as directed by the Active Controller.
OUTPUT
Send data to bus devices as directed by the Active Controller.
REQUEST
Set own Serial Poll request (including Service Request) status.
SPOLL
Get own Serial Poll request status.
As a bus Peripheral, Driver488/DRV must respond to the commands issued by the Active Controller.
The controller, for example, can address Driver488/DRV to Listen in preparation for sending data.