2 encoder evaluation method, 3 encoder with htl level at di1/di2, Encoder evaluation method – Lenze E84DSxxx User Manual
Page 168: Encoder with htl level at di1/di2, Encoder evaluation method ( 168), 5motor control (mctrl)
5
Motor control (MCTRL)
5.8
Encoder/feedback system
168
Lenze · 8400 protec StateLine · Reference manual · DMS 4.2 EN · 03/2013 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8.2
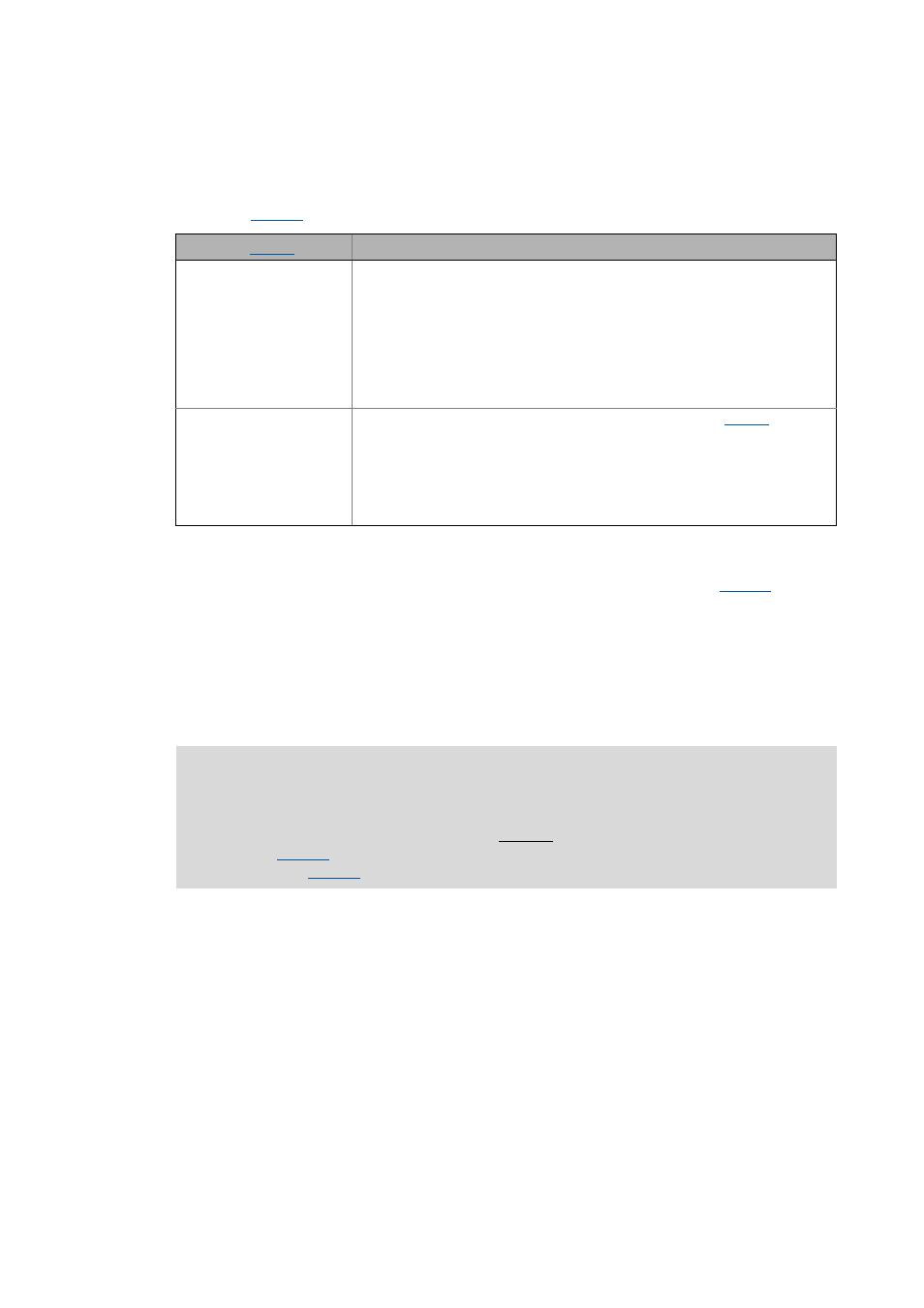
Encoder evaluation method
Depending on the encoder used, the following table specifies which evaluation method should be
Tip!
We recommend to use the preset procedure for low-resolution encoders (
= 1). This
procedure can also be used for dynamic applications (e.g. V/f + encoder).
5.8.3
Encoder with HTL level at DI1/DI2
Selection in
Encoder evaluation method
1: Low-resolution encoder
(Lenze setting)
High-precision procedure for low-resolution encoders (<=128 increments)
• Exact method for speed measurement with automatic scanning time setting
(0.5 … 500 ms) for low-resolution encoders in the range of 4 …. 128 increments.
• Evaluation with automatic scanning time minimisation for an optimum dynamic
performance.
• Method is also suited for encoders with poor signal quality, e.g. for encoders with
high error rate in scanning ratio and phase offset.
• This method requires an equidistant period length per encoder increment.
• Wiring according to EMC (e.g. motor and encoder cable shielding) is required!
3: Edge-counting procedure
Simple edge counting procedure with adjustable scanning time (
• Speed measurement by means of the edges of tracks A and B measured per
scanning interval.
• Integrated correction algorithm for EMC interference.
• Limited suitability for systems with unshielded encoder and/or motor cable.
• Limited suitability for encoders with poor signal quality, i.e. high error rate in
scanning ratio and phase offset.
Note!
At the digital terminals DI1 and DI2, only encoders with HTL level can be used.
In spite of the selected operating mode without encoder feedback, the actual speed
) is calculated if an encoder is connected and "1: Encoder signal FrqIn12" is
selected in