7 canopen data transfer, 1 protocol, 2 structure of reference data in uss standard – NORD Drivesystems BU0260 User Manual
Page 81
7 CANopen Data transfer
BU 0260 GB
Subject to technical amendments
81
7 CANopen data transfer
CAN / CANopen communication is based on a multi-master principle. Although the network can be overridden
by a so-called NMT master (Network Management Master), this only takes over control of the functions of all
connected nodes (subscribers) and can can change their operating statuses (initialisation / pre-operational /
operational / stopped (previously: prepared)).
Communication between the individual subscribers, both as queries and responses is controlled by the
participants themselves. In principle, all nodes are in a "ready" status. On request from other nodes, or
according to their own requirements all peers are able to sent protocols on the bus (multi-master).
Simultaneous transmission access by several nodes is resolved by a prioritisation of the messages to be sent.
This ensures that the message with the highest priority receives permission for transmission. Messages which
are postponed due to lower priority are then sent.
Therefore a pseudo real-time capability of the systems is ensured, in particular for telegrams with higher
priority* (*with maximum bus load 40%). The priority of a telegram is defined by its identifier. The identifier of a
telegram is comprised of its node address and the type of telegram (e.g.: Emergency Message). This rules out
the double assignment of identifiers. The lower the identifier, the higher its priority.
Communication between subscribers largely complies with the client-server model. The producer-consumer
model only comes into effect for the transfer of process data.
7.1 Protocol
Communication on the bus is carried out with the aid of telegrams on the basis of the CAN protocol. A CAN
protocol consists of an overhead section (addressing, error monitoring ...) and a reference data section (for
process control). CANopen is based on this structure, whereby two groups of reference data telegrams have
been defined for the process.
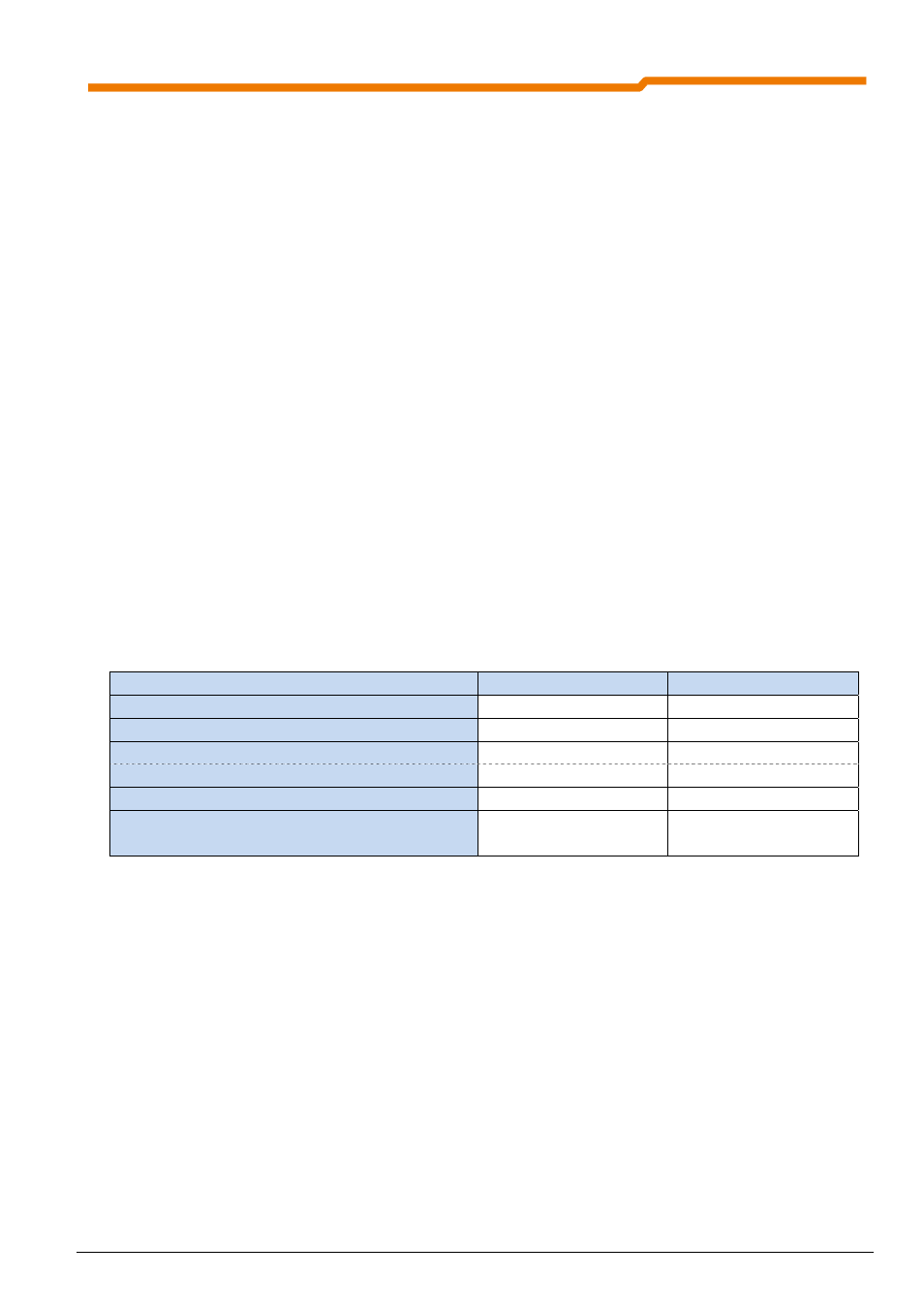
In addition to the length of 8 bytes, the "addressing" via identifier is identical for both types of telegram.
The primary differentiating features are the following:
Property
SDO telegram
PDO telegram
Transfer of parameter data (parameterisation) Yes
No
Exchange of process data
Not usual (not real-time)
Yes
Data processing model
Client - Server
Producer - Consumer
Response to query necessary
Yes (handshake)
No
Data rate
Low
High
Required node operating status
Operational
Pre-Operational
Operational
7.2 Structure of reference data in USS standard
After switch-on a node runs through an initialisation phase and automatically changes to the operating status
"Pre-Operational". In this state it is able to communicate via SDOs. The node only attains full operational
readiness by setting into the operating status "Operational", and is then entitled to exchange data via PDOs.
The parameters of a node are stored in an object dictionary, whose structure corresponds to that of other bus
systems. Therefore there is a basic compatibility between various bus systems.
As process data is also stored in the object dictionary of the node, this can also be processed via SDOs.