6 timeout monitoring, 7 saving the parameters, 8 special features of canopen communication – NORD Drivesystems BU0260 User Manual
Page 47
4 Commissioning
BU 0260 GB
Subject to technical amendments
47
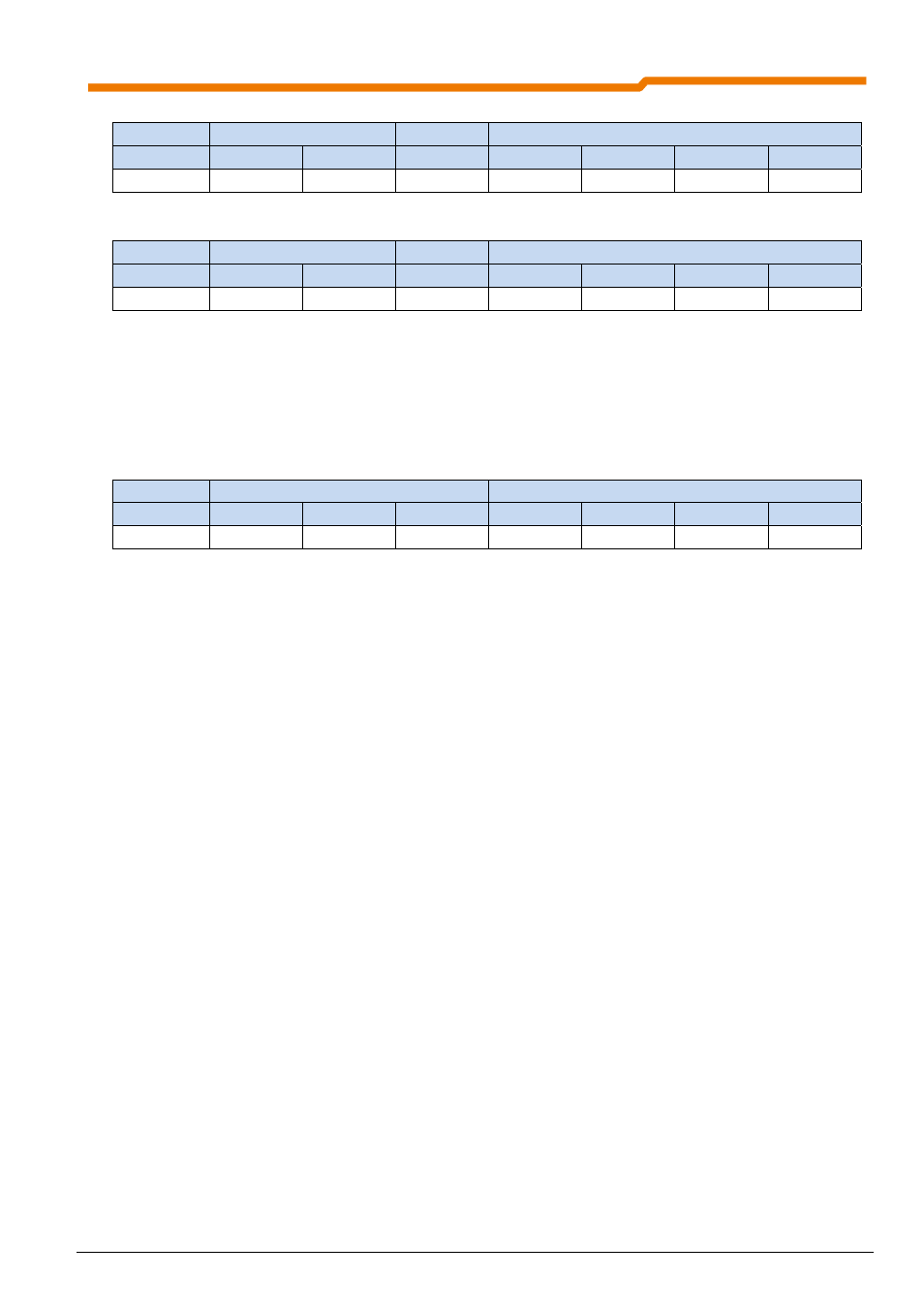
Load a 32 bit value (0x1800 Sub 01)
Control byte
Index
Sub-index
Data
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
0x40 0x00 0x18 0x01 0x00 0x00 0x00 0x00
Response (0x1800 Sub 1 = 0x40000182)
Status byte
Index
Sub-index
Data
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
0x43 0x00 0x18 0x01 0x82 0x01 0x00 0x40
If the query is faulty, the response in byte 0 = 0x80.
4.5.4.5 Cancelling of parameter communication
If problems occur during parameter communication (e.g. value range overflow), a cancel telegram is sent. This
can be recognised by the number 0x80 in byte 0. The cause of the cancellation is indicated in bytes 4 to 7.
Status byte
Last index used
Error code
Byte 0
Byte 1
Byte 2
Byte 3
Byte 4
Byte 5
Byte 6
Byte 7
0x80 0x00 0x18 0x01 0x02 0x00 0x01 0x06
Example of error message ( 0x06010002 = Access to read-only object)
A list of all possible error codes is contained in Section 4.9.5 "Error codes – cancellation of parameter
communication"
4.6 Timeout monitoring
Various timeout monitoring modules can be defined. Details of these are described in Section 6.1.1 "Error
monitoring details".
4.7 Saving the parameters
If the CANopen bus module is accessed via RS232 (e.g. via NORDCON software or the ParameterBox), the
parameter changes are saved in the EEPROM immediately. Loading of the factory settings can be carried out
via parameter (P152).
For changes to module parameters via the CANopen bus, 0x1010 Subindex 1 is used to save the parameter.
Restoration of default values is possible via 0x1011 Subindex 1.
4.8 Special features of CANopen communication
The DSP402 drive profile is only implemented in the field bus modules (SK xU4-CAO).
Broadcast operation is not possible via the CANopen field bus modules (SK xU4-CAO). This can only take
place directly between the frequency inverters at system bus level or with direct connection of the frequency
inverter to the CANopen field bus.