A4.9.1 mode transitions, A4.10 bumpless transfer, A4.11 setpoint limiters – Yokogawa Wireless Temperature Transmitter YTA510 User Manual
Page 82: A4.11.1 when pid block is in auto mode, A4.9.1, A4-6
A4-6
IM 01C50T02-01E
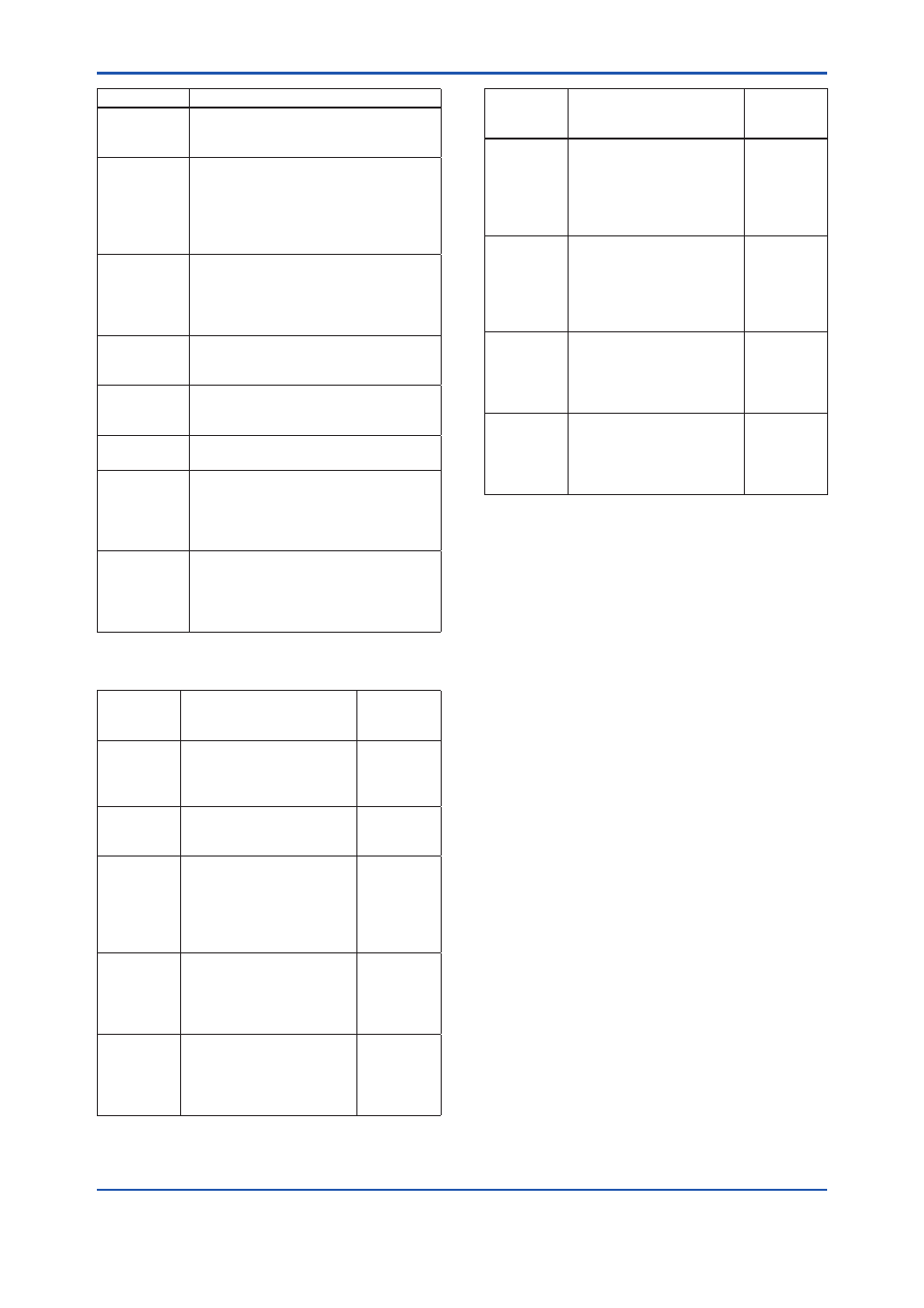
Block Mode
Description
ROut
Remote output mode, in which the
PID block outputs the value set in
ROUT_IN.
RCas
Remote cascade mode, in which the
PID block carries out the PID control
computation based on the setpoint (SP)
set via the remote cascade connection,
such as from a computer, and outputs
the computed result.
Cas
Cascade mode, in which the PID block
carries out the PID control computation
based on the setpoint (SP) set from
another fieldbus function block, and
outputs the computed result.
Auto
The PID block carries out automatic
control and outputs the result computed
by the PID control computation.
Man
Manual mode, in which the PID block
outputs the value set by the user
manually.
LO
The PID block outputs the value set in
TRK_VAL.
IMan
Initialization and manual mode, in which
the control action is suspended. The
PID block enters this mode when the
specified condition is met (see Section
A4.14).
O/S
Out of service mode, in which neither
the control computation nor action is
carried out, and the output is kept at the
value that was output before the PID
block entered into O/S mode.
A4.9.1 Mode Transitions
Transition
Destination
Mode
Condition
NOT
Conditions
O/S
1. If O/S is set in
MODE_
BLK.target (or if O/S is
set in
target inside the
resource block)
IMan
2. If the specified condition
is met (see Section
A4.14)
NOT if
condition 1
is met
LO
3. If Track Enable is
specified in
CONTROL_
OPTS and the value of
TRK_IN_D is true
NOT if
either or
both of
conditions
1 and 2 are
met
Man
4. If Man is set in
MODE_
BLK.target or if
IN.status (input status)
is Bad
NOT if
any one
or more of
conditions 1
to 3 are met
Auto*
5. If Auto is set in
MODE_
BLK.target
- AND -
if
IN.status (input status)
is not Bad
NOT if
any one
or more of
conditions 1
to 3 are met
Transition
Destination
Mode
Condition
NOT
Conditions
Cas*, **
6. If Cas is set in
MODE_
BLK.target
- AND -
if neither
IN.status
(input status) nor
CAS_
IN.status is Bad.
NOT if
any one
or more of
conditions 1
to 3 are met
RCas*, **
7. If RCas is set in
MODE_
BLK.target
- AND -
if neither
IN.status (input
status) nor
RCAS_
IN.status is Bad.
NOT if
any one
or more of
conditions 1
to 3 are met.
ROut*, **
8. If ROut is set in
MODE_
BLK.target
- AND -
if
ROUT_IN.status (input
status) is not Bad
NOT if
any one
or more of
conditions 1
to 3 are met.
In
accordance
with the
SHED_OPT
setting
9.
If RCAS_IN.status or
ROUT_ IN.status is Bad
(indicating a computer
failure; see Section
A4.17.1 for details)
*
To activate mode transitions to Auto, Cas, RCas,
and ROut, the respective target modes must be set
beforehand to MODE_BLK.permitted.
**
A transition to Cas, RCas, or ROut requires that
initialization of the cascade connection has been
completed.
A4.10 Bumpless Transfer
Prevents a sudden change in the control output
OUT at changes in block mode (MODE_BLK) and
at switching of the connection from the control
output OUT to the cascaded secondary function
block. The action to perform a bumpless transfer
differs depending on the MODE_BLK values.
A4.11 Setpoint Limiters
Active setpoint limiters that limit the changes in the
SP value, differ depending on the block mode as
follows.
A4.11.1 When PID Block Is in Auto Mode
When the value of MODE_BLK is Auto, the four
types of limiters are in force: high limit, low limit,
rate-of-increase limit, and rate-of-decrease limit.
Setpoint High/Low Limits
• A value larger than the value of SP_HI_LIM
cannot be set for SP.
• A value smaller than the value of SP_LO_LIM
cannot be set for SP.