A4.5.1 velocity type output action, A4.6 direction of control action, A4.7 control action bypass – Yokogawa Wireless Temperature Transmitter YTA510 User Manual
Page 81: A4.8 feed-forward, A4.9 block modes, A4.5.1, A4.6, A4.7, A4.8, A4.9
A4-5
IM 01C50T02-01E
A4.5.1 Velocity Type Output Action
The PID block determines the value of the new
control output OUT by adding the change in control
output calculated in the current control period,
∆MVn, to the current read-back value of the MV,
MVRB (BKCAL_IN). This action can be expressed
as:
OUT = BKCAL_IN – ∆MVn'
∆MVn' = ΔMVn which is scaled by
PV_SCALE and OUT_SCALE
A4.6 Direction of Control Action
The direction of the control action is determined by
the Direct Acting setting in CONTROL_OPTS.
Value of Direct Acting
Resulting Action
True
The output increases when
the input PV is greater than
the setpoint SP.
False
The output decreases when
the input PV is greater than
the setpoint SP.
A4.7 Control Action Bypass
The PID control computation can be bypassed so
as to set the SP value in the control output OUT as
shown below. Setting BYPASS to “On” bypasses
the PID control computation.
Setpoint
Control
Feed-
forward
CAS_IN
Filter
IN
PV
BYPASS
SP
RCAS_IN
Output
OUT
FA0402.ai
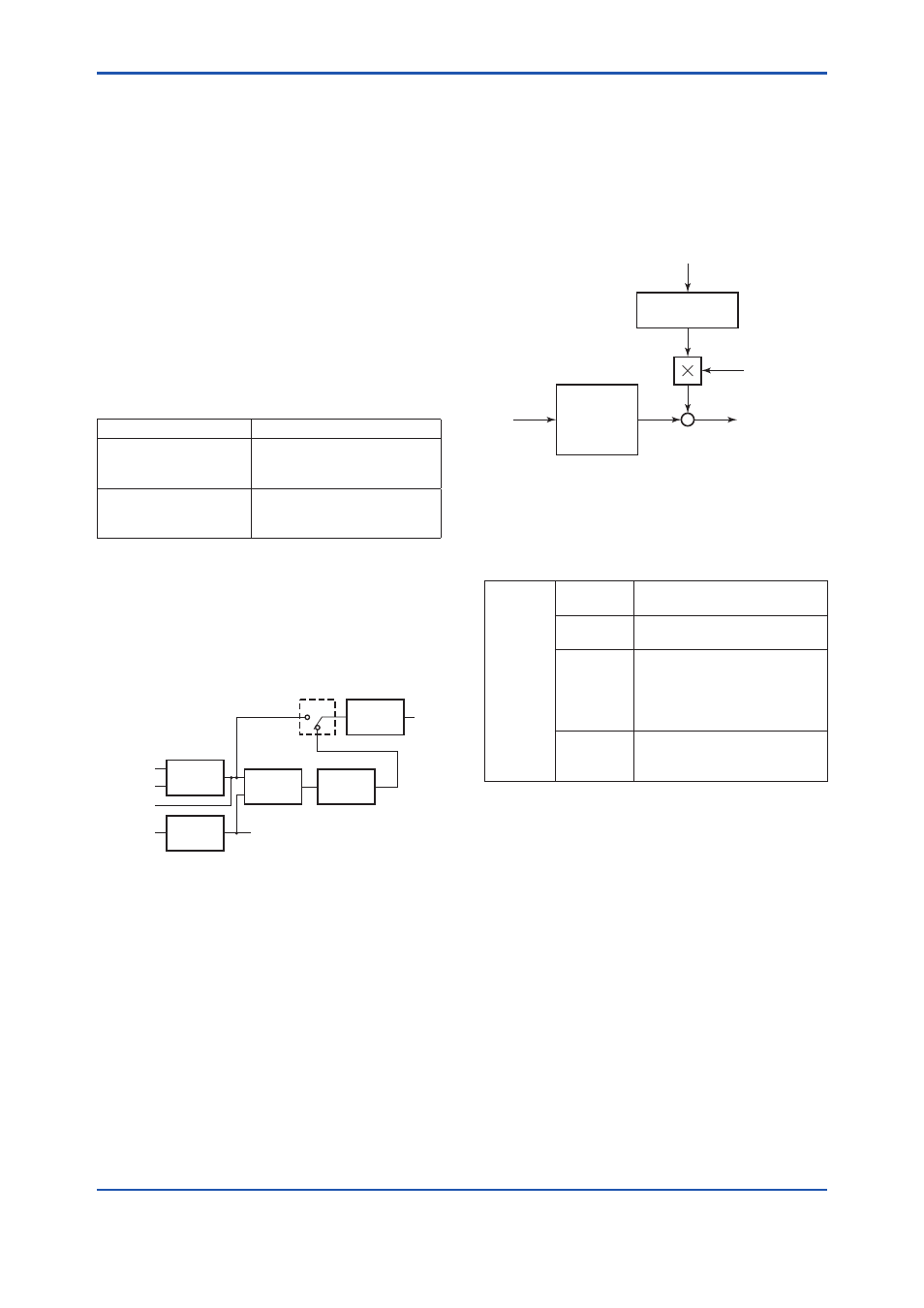
A4.8 Feed-forward
Feed-forward is an action to add a compensation
output signal FF_VAL to the output of the PID
control computation, and is typically used for feed-
forward control. The figure below illustrates the
action.
PID
computation
FF_SCALE
OUT_SCALE
PV
OUT
FF_VAL
FF_GAIN
FA0403.ai
the change in
A4.9 Block Modes
The block mode is set in the parameter MODE-
BLK.
MODE_
BLK
Target
Stipulates the target mode to
which the PID block transfers.
Actual
Indicates the current mode of
the PID block.
Permitted Stipulates all the modes that
the PID block can enter. The
PID block is prohibited to
enter any mode other than
those set in this element.
Normal
Stipulates the mode in which
the PID block normally
resides.
There are eight modes for a PID block as shown
below.