A4.3 parameters of pid block, A4.3, A4-2 – Yokogawa Wireless Temperature Transmitter YTA510 User Manual
Page 78
A4-2
IM 01C50T02-01E
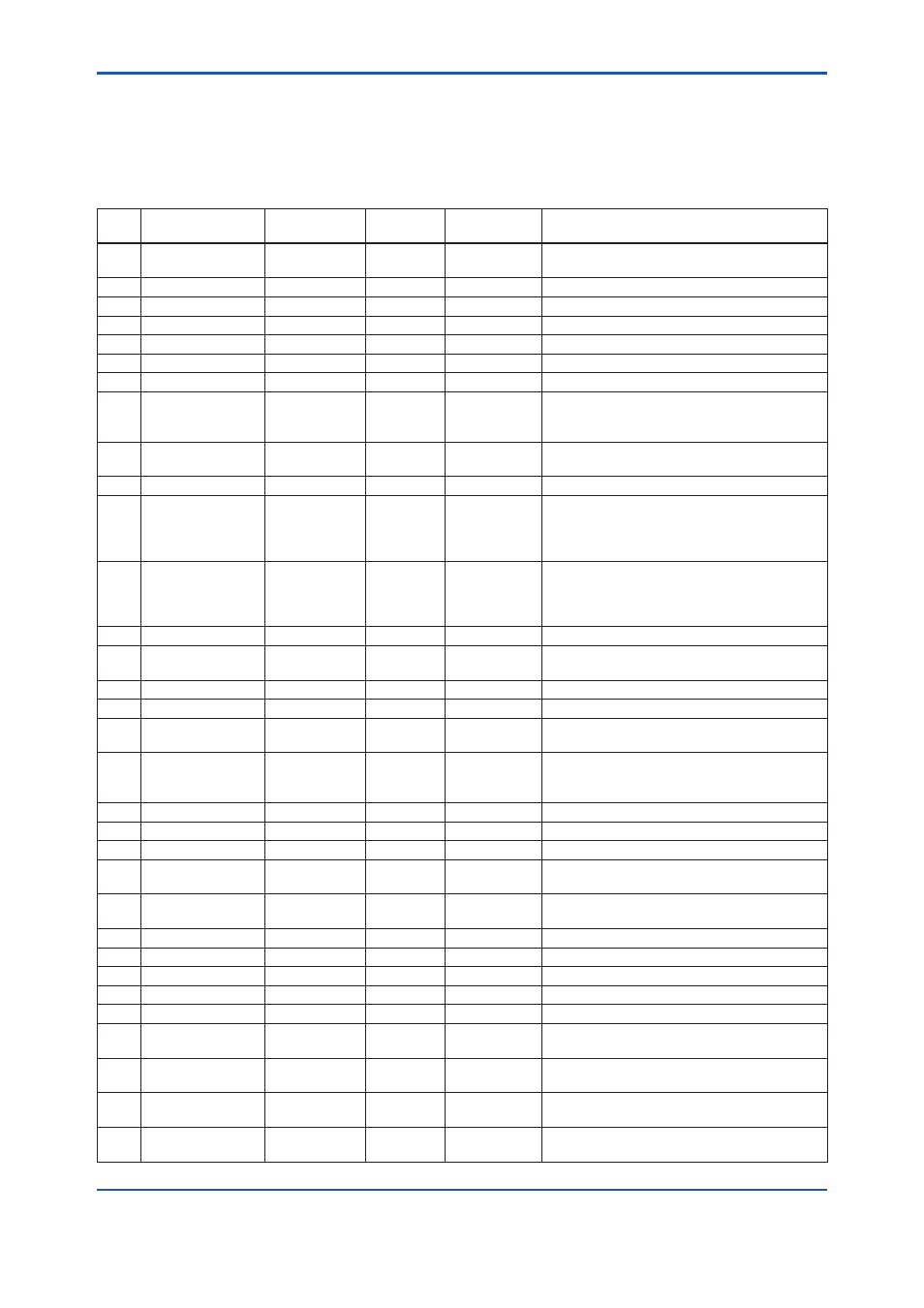
A4.3 Parameters of PID Block
NOTE: In the table below, the Write column shows the modes in which the respective parameters can be
written. A blank in the Write column indicates that the corresponding parameter can be written in all
modes of the PID block. A dash (-) indicates that the corresponding parameter cannot be written in any
mode.
Index Parameter Name
Default
(factory setting)
Write
Valid Range
Description
0
Block Header
TAG: “PID”
Block Tag =
O/S
Same as that for an AI block.
1
ST_REV
—
Same as that for an AI block.
2
TAG_DESC
(blank)
Same as that for an AI block.
3
STRATEGY
1
Same as that for an AI block.
4
ALERT_KEY
1
1 to 255
Same as that for an AI block.
5
MODE_BLK
6
BLOCK_ERR
—
Same as that for an AI block.
7
PV
—
Measured value; the non-dimensional value
that is converted from the input (IN) value
based on the PV_SCALE values and filtered.
8
SP
0
AUTO
PV_SCALE
±10%
Setpoint
9
OUT
MAN
Output
10
PV_SCALE
100
0
1133
1
O/S
Upper and lower scale limit values used for
scaling of the input (IN) value.
11
OUT_SCALE
100
0
1342
1
O/S
Upper and lower scale limit values used for
scaling of the control output (OUT) value to the
values in the engineering unit.
12
GRANT_DENY
0
AUTO
Same as that for an AI block.
13
CONTROL_OPTS
0
O/S
Setting for control action. See Section A4.13
for details.
14
STATUS_OPTS
0
O/S
See Section A4.15 for details.
15
IN
0
Controlled-value input
16
PV_FTIME
2
AUTO
Non-negative Time constant (in seconds) of the first-order
lag filter applied to IN
17
BYPASS
1 (off)
MAN
1, 2
Whether to bypass the control computation.
1 (off): Do not bypass.
2 (on): Bypass.
18
CAS_IN
0
Cascade setpoint
19
SP_RATE_DN
+INF
Positive
Rate-of-decrease limit for setpoint (SP)
20
SP_RATE_UP
-INF
Positive
Rate-of-increase limit for setpoint (SP)
21
SP_HI_LIM
100
PV_SCALE
±10%
Upper limit for setpoint (SP)
22
SP_LO_LIM
0
PV_SCALE
±10%
Lower limit for setpoint (SP)
23
GAIN
1
Proportional gain (= 100 / proportional band)
24
RESET
10
Integration time (seconds)
25
BAL_TIME
0
Positive
Unused
26
RATE
0
Positive
Derivative time (seconds)
27
BKCAL_IN
0
Read-back of control output
28
OUT_HI_LIM
100
OUT_SCALE
±10%
Upper limit for control output (OUT)
29
OUT_LO_LIM
0
OUT_SCALE
±10%
Lower limit for control output (OUT)
30
BKCAL_HYS
0.5 (%)
0 to 50%
Hysteresis for release from a limit for OUT.
status
31
BKCAL_OUT
0
—
Read-back value to be sent to the BKCAL_IN
in the upper block