Micromod Micro-DCI: 53MC5000 Multi-Loop Process Controller FLEXIBLE CONTROL STRATEGIES User Manual
Page 37
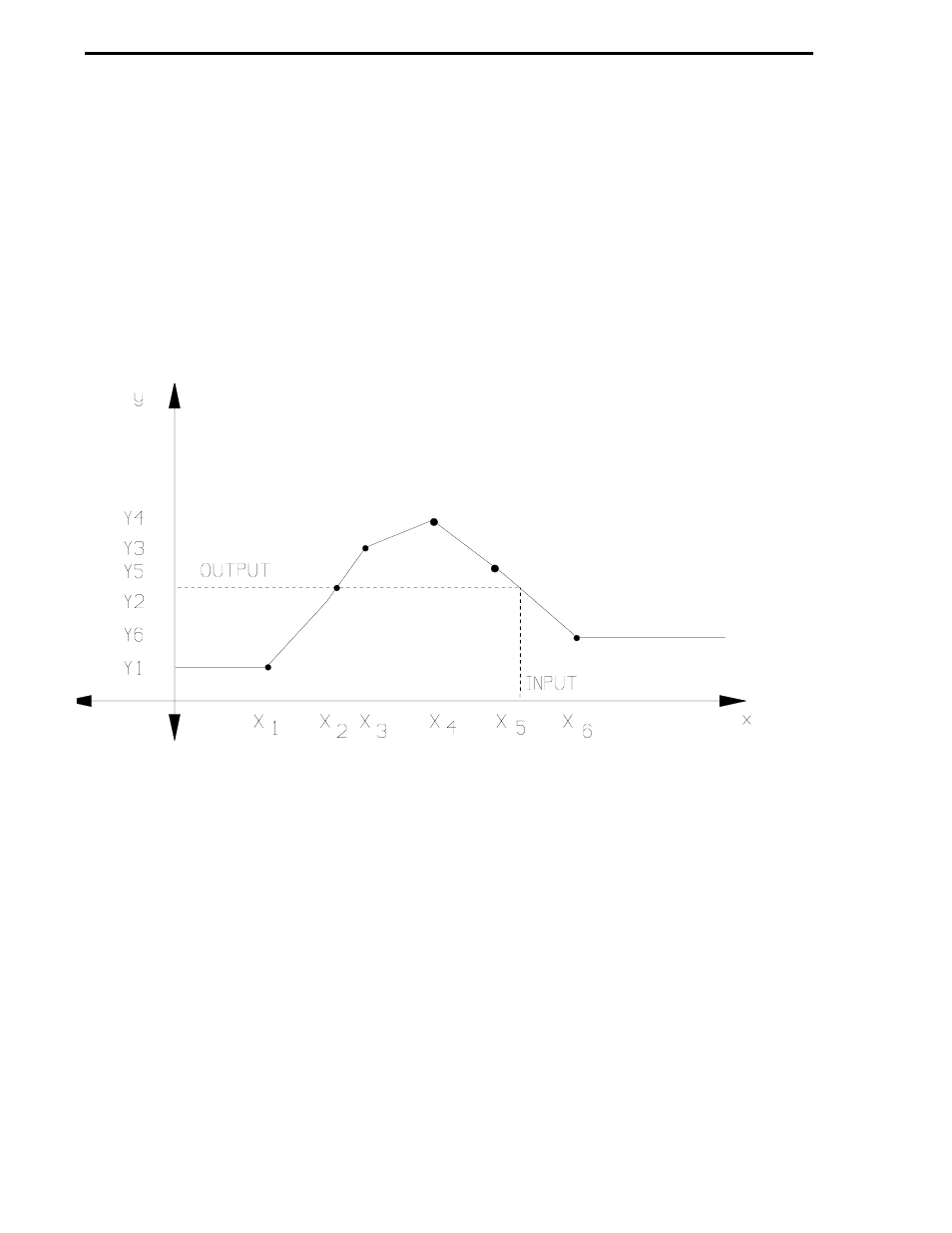
2.7.20.1 PIECEWISE CHARACTERIZER/FUNCTION GENERATOR (FC=15)
This FC permits linearization of input signal A or the generation of a function based on the A input.
This operation permits the user to specify a piecewise linear approximation (five segments) of the
input/output relationship desired. Pieces are specified by six ordered pairs of coordinates (X,Y).
Whenever the input exceeds an X-axis end point, the output will be set equal to the Y value of the
endpoint. Values for X ordinates must be monotonically increasing. The X and Y coordinates illus-
tated in the piecewise characterization below are configured into the constant parameters K1
through K12 of the module as follows.
(X
1
,Y
1
) - (K1,K2)
(X
4
,Y
4
) - (K7,K8)
(X
2
,Y
2
) - (K3,K4)
(X
5
,Y
5
) - (K9,K10)
(X
3
,Y
3
) - (K5,K6)
(X
6
,Y
6
)-(K11,K12)
2.7.20.2 POLYNOMIAL CHARACTERIZER (FC = 16 OR FC = 17)
Two polynomial equations are available, an 11th order and a 3rd order as follows:
(FC=17) OUT = K1
×
A
11 + K2
×
A
10 + K3
. . . ×
A
2 + K11
×
A + K12
(FC=16) OUT = [K1
×
A
3 + K2
×
A
2 + K3
×
A + K4]
×
K5
These equations are used to characterize the A input. Characterization is possible so long as the
proper coefficients can be determined which result in an acceptable curve fit. These equations
have been especially useful in thermocouple and rtd linearization over a relatively wide range.
FCS 53MC5000 Flexible Control Strategies
2-30
EMATH-B