4 mode: stopped, 2 reinitialization of the encoder, 2 normal operating – BEI Sensors MHK5 Absolute Hollow Shaft Encoder User Manual
Page 18
Version 07/10
BEI Sensors CANopen Manual serie M
18
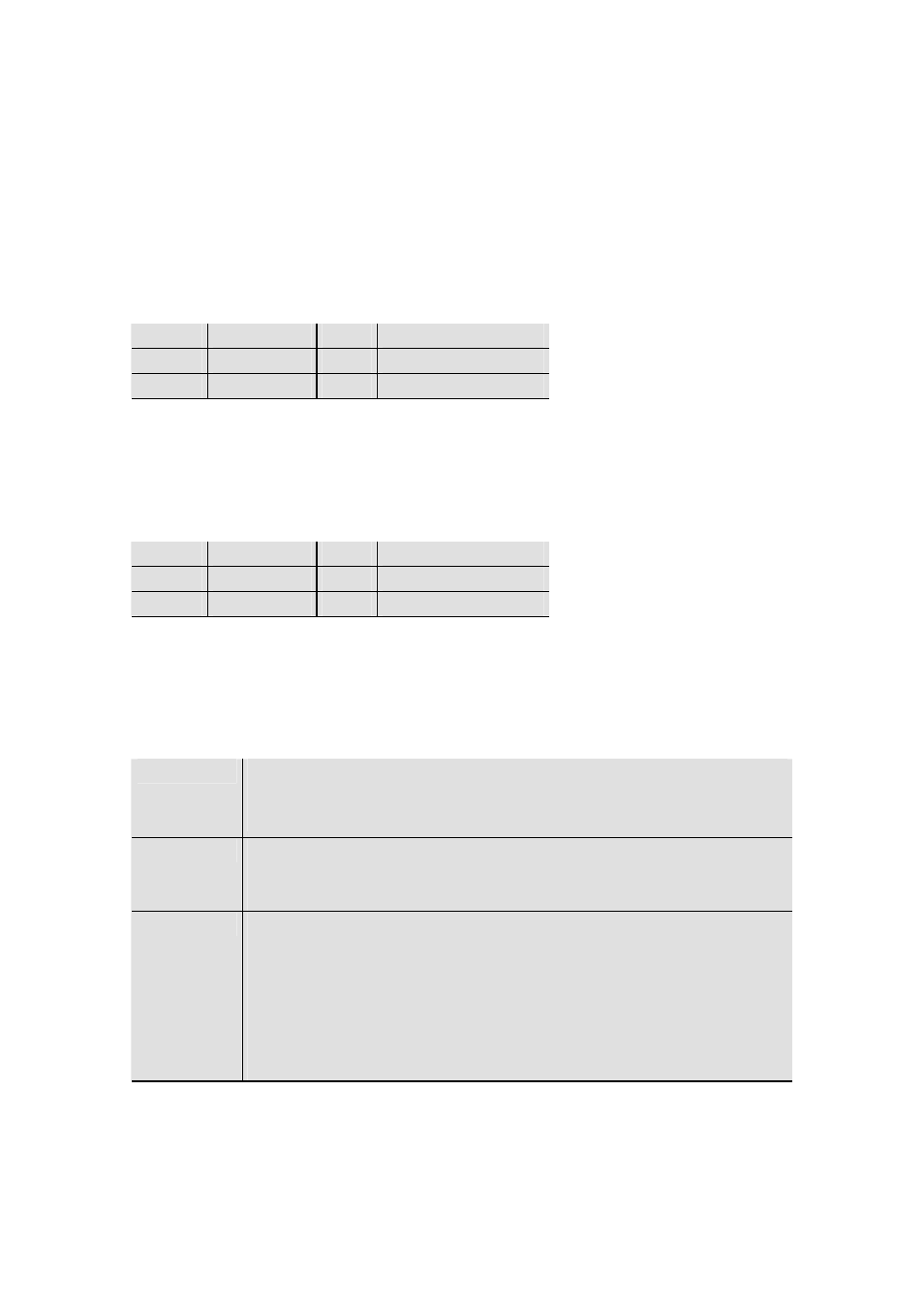
4.1.4 Mode: Stopped
To put one or all nodes in the stopped state, the master have to send the following message:
Identifier
Byte 0
Byte 1
Description
0 h
02 h
00
NMT-Stop, all nodes
0 h
02 h
NN
NMT-Stop, NN
NN: node number
It is possible to set all nodes (Index 0) or a single node (Index NN) to stop mode.
4.1.2 Reinitialization of the Encoder
If a node is not operating correctly, it is advisable to carry out a reinitialization:
NN
Command
Index
Description
0 h
82 h
00
Reset Communication
0 h
81 h
NN
Reset Node
NN: node number
It is possible to set all nodes (Index 0) or a single node (Index NN) in reset mode.
After reinitialization, the encoder accesses the bus in pre-operational mode.
4.2 Normal Operating
Polled Mode
By a remote-transmission-request telegram the connected host calls for the current
process value. The encoder reads the current position value, calculates eventually set-
parameters and sends back the obtained process value by the same identifier.
Cyclic Mode
The encoder transmits cyclically - without being called by the host - the current process
value. The cycle time can be programmed in milliseconds for values between 1 ms and
65536 ms.
Sync Mode
After receiving a sync telegram by the host, the encoder answers with the current
process value. If more than one node number (encoder) shall answer after receiving a
sync telegram, the answer telegrams of the nodes will be received by the host in order
of their node numbers. The programming of an offset-time is not necessary. If a node
should not answer after each sync telegram on the CAN network, the parameter sync
counter can be programmed to skip a certain number of sync telegrams before
answering again.
Tab. 11 CAN Transmission Mode Description