Pid m – IDEC MicroSmart Pentra User Manual
Page 93
C
ONFIGURING
PID M
ODULE USING
W
IND
LDR
6-28
FC5A MicroSmart PID Module User’s Manual FC9Y-B1283
SP
OFF
ON
OFF
ON
5
5
200
205
203
195
197
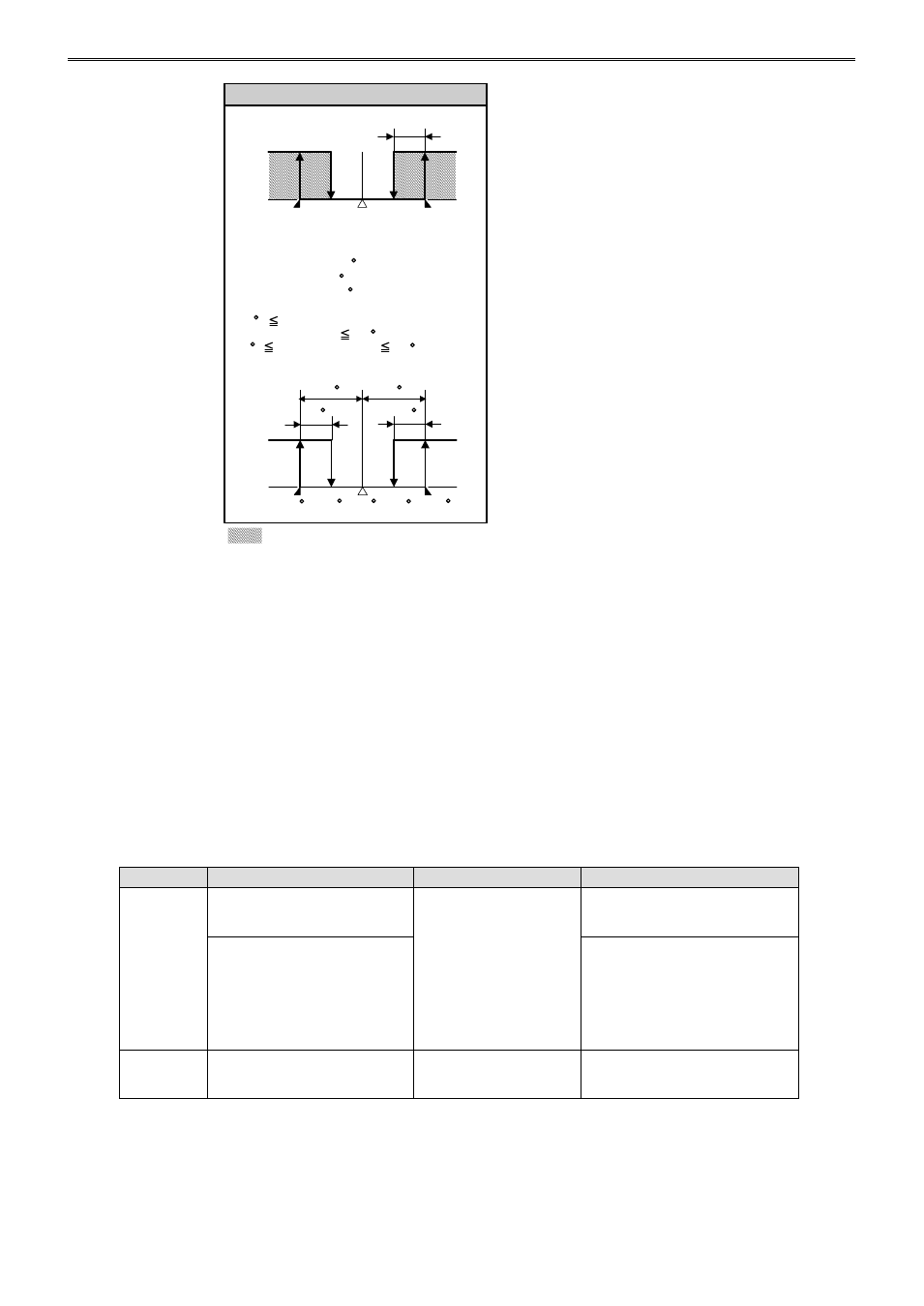
Alarm Hysteresis
Upper/Lower Limits Alarm with Standby
Alarm Value
Alarm Value
: Standby functions.
[Setting Example]
Set Point (SP)
: 2.0
Alarm 1 Value
: 200 C
: 5 C
Alarm 1 Hysteresis
C
Process Variable (PV) 203 : Alarm
Output OFF
C
197
C
Process Variable (PV) 195 : Alarm Output ON
C
C
205
Process Variable (PV) or
C
C
2.0
2.0
C
C
C
C
C
C
C
[Alarm Action]
Notes:
· When the set point (SP) is changed, the standby function is enabled. Once the process variable (PV)
enters the alarm output off range, the standby function is canceled.
· Even when an alarm output is triggered, the PID module continues its control. To stop the control when an
alarm is triggered, ladder programming is needed. For a ladder program example, see 7-6.
(7) Control Register+37: Alarm 1 Value
Control Register+38: Alarm 2 Value
Control Register+39: Alarm 3 Value
Control Register+40: Alarm 4 Value
Control Register+41: Alarm 5 Value
Control Register+42: Alarm 6 Value
Control Register+43: Alarm 7 Value
Control Register+44: Alarm 8 Value
There are two types of alarms: Deviation alarm and process alarm.
Alarm Type
Alarm Value
Alarm Action
Deviation
Alarm
Upper/Lower limit range alarm
Deviation from the set
point (SP) is the alarm
value.
The alarm output turns off if the
process variable (PV) exceeds
the range.
Upper limit alarm,
Lower limit alarm,
Upper/Lower limits alarm,
Upper limit alarm with standby,
Lower limit alarm with standby,
Upper/Lower limits alarm with
standby
The alarm output turns on if the
process variable (PV) exceeds
the range.
Process
Alarm
Process high alarm
Process low alarm
The alarm action point is
the alarm value.
The alarm output turns on if the
process variable (PV) exceeds
the alarm value.
When the alarm value is 0, the alarm action is disabled except process high alarm and process low alarm.
If the input type or input unit type is changed, confirm the valid range of the alarm value and configure
appropriate values.