2) setting the electronic gear ratio, 2) setting the electronic gear ratio -5 – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 94
5.2 Command Related Parameters Details
5-5
5
Command Related Parameters
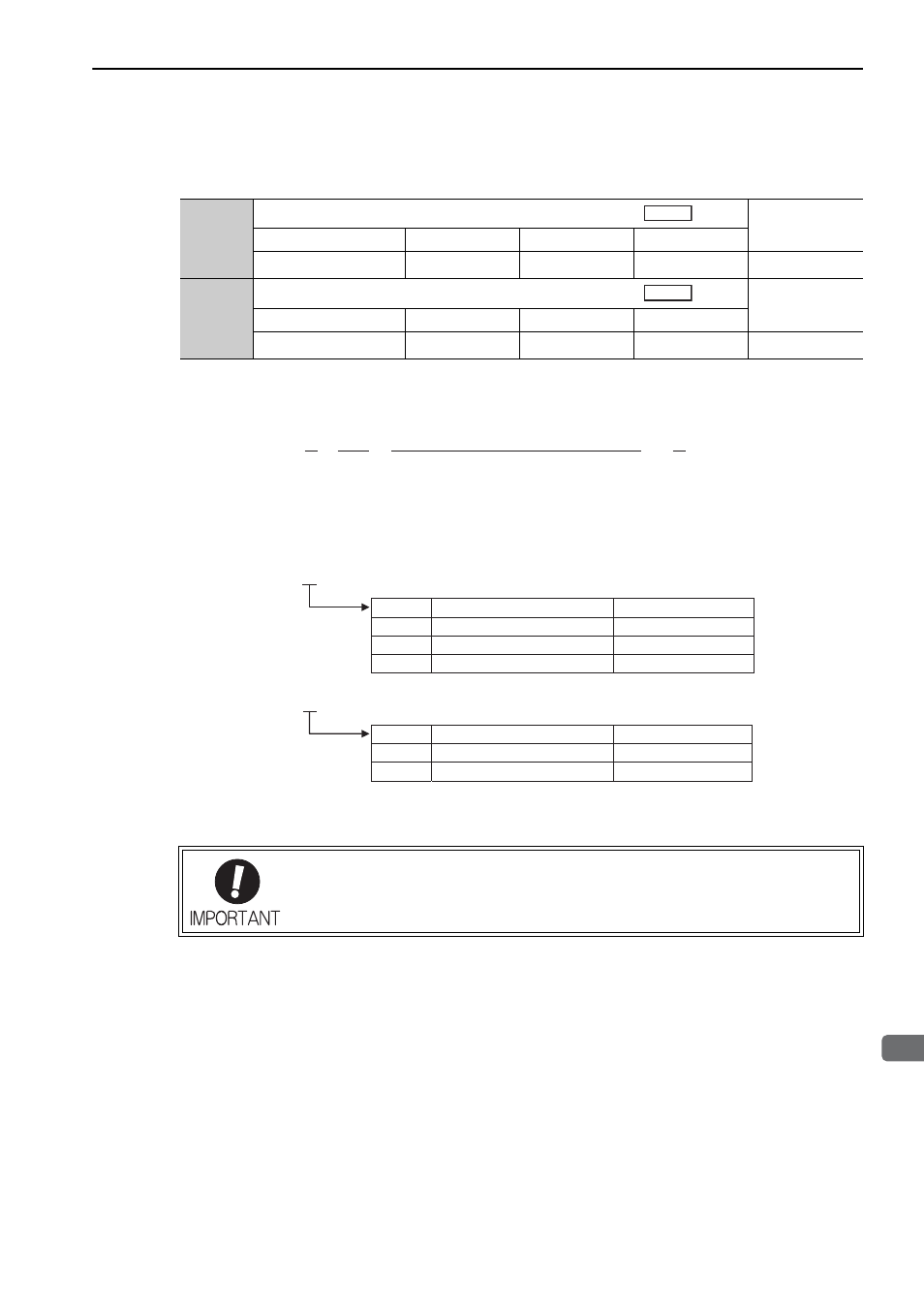
(2) Setting the Electronic Gear Ratio
Use the parameters Pn20E and Pn210 to set the electronic gear ratio.
If the decelerator ratio of the motor and load shaft is given as n/m, where m is the rotation of the motor and n
is the rotation of the load shaft,
Encoder Resolution
Encoder resolution can be checked with servomotor model designation.
Pn20E
Electronic Gear Ratio (Numerator)
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 1073741824 (2
30
)
–
4
After restart
Setup
Pn210
Electronic Gear Ratio (Denominator)
Classification
Setting Range
Setting Unit
Factory Setting
When Enabled
1 to 1073741824 (2
30
)
–
1
After restart
Setup
Position
Position
B
Pn20E Encoder
resolution
m
=
=
A
Pn210
Travel distance per load shaft rotation
(reference unit)
Electronic gear ratio
n
Electronic gear ratio setting range: 0.001
≤
Electronic gear ratio (B/A)
≤
4000
If the electronic gear ratio is outside this range, a parameter setting error (A.040) will be
output.
SGM V
Symbol
Specification
Encoder Resolutions
Symbol
Specification
Encoder Resolutions
3 20-bit
absolute
1048576
D 20-bit
incremental
1048576
A 13-bit
incremental
8192
SGMPS
2 17-bit
absolute
131072
C 17-bit
incremental
131072