Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 44
3.2 Commands Details
3-13
3
Commands for Preparation Process
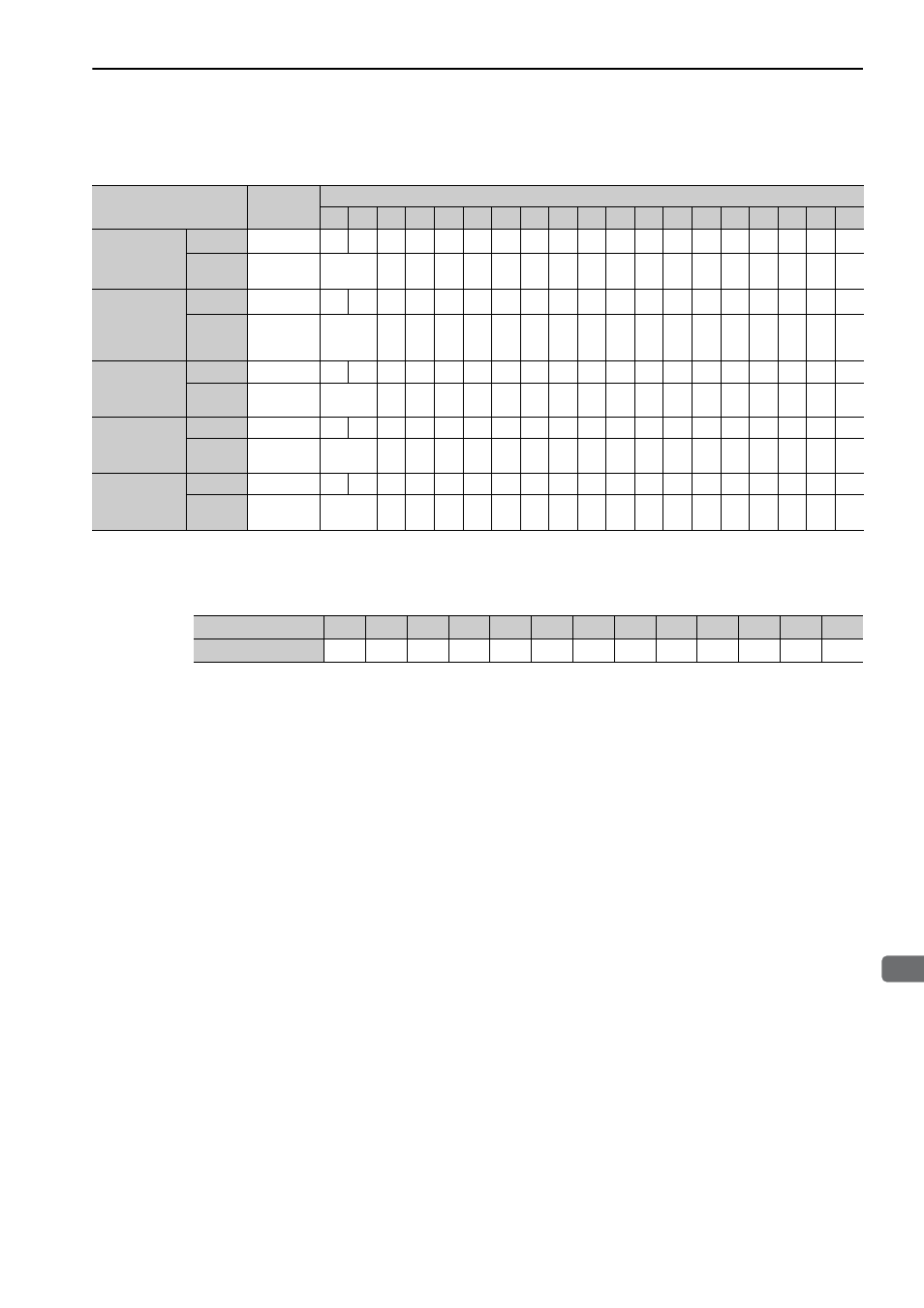
When the Large-Capacity
Σ-V Series SERVOPACKs (SGDV-H11, -J11) are
Used
• SERVOPACK Model
*1: Model code, *2: Current capacity, *3: Power supply voltage specifications, *4: Interface specifications,
*5: Design revision order, *6: Options
Example: ID_RD when large capacity
Σ-V series SERVOPACK (SGDV-131J11A) is used.
• Servomotor Model
*7: Model code, *8: Rated output, *9: Power supply voltage, *10: Encoder type, *11: Design revision order,
*12: Shaft-end specifications, *13: Options
• Software version is binary data.
• Model is expressed in ASCII code and “00 (NULL)” is added at the end of each character string.
• 50H and 52H of DEVICE_CODE are reserved for system.
• When the Safety Option unit or/and Feedback Option unit are not connected, 0 is set to all the ID data.
• For an external encoder, the ID of the encoder connected to the Feedback Option unit is set.
(Therefore, 0 is set to all the ID data when no Feedback Option unit is connected.)
• When an encoder option for fully-closed loop control is connected to the Feedback Option unit, 0 is set to all
the ID data of Feedback Option unit.
Device Type/Name
DEVICE_
CODE
OFFSET
00
01
02
03
04
05
06
07
08
09
0A 0B 0C 0D 0E 0F
10
11
12
SERVOPACK
Model
00H
b
S
G
D
∗
1
∗
2
∗
2
∗
2
∗
3
∗
4
∗
4
∗
5
∗
6
∗
6
∗
6
∗
6
∗
6
∗
6
00
Software
version
02H
Ver.
Servomotor
Model
20H
S
G
M
∗
7
∗
7
–
∗
8
∗
8
∗
9
∗
10
∗
11
∗
12
∗
13 00
Encoder
software
version
12H
Ver.
External
Encoder
Model
30H
Software
version
32H
Ver.
Safety Option
Unit
Model
60H
Software
version
62H
Ver.
Feedback
Option Unit
Model
70H
Software
version
72H
Ver.
OFFSET
00
01
02
03
04
05
06
07
08
09
0A
0B
0C
ID_RD
b
S
G
D
V
1
3
1
J
1
1
A
00