12 turn servo off (sv_off: 32h), 12 turn servo off (sv_off: 32h) -24, 1) sv_off command (32h) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 55
3 Commands for Preparation Process
3.2.12 Turn Servo OFF (SV_OFF: 32H)
3-24
3.2.12 Turn Servo OFF (SV_OFF: 32H)
Send an SV_OFF command to stop current flow through the servomotor.
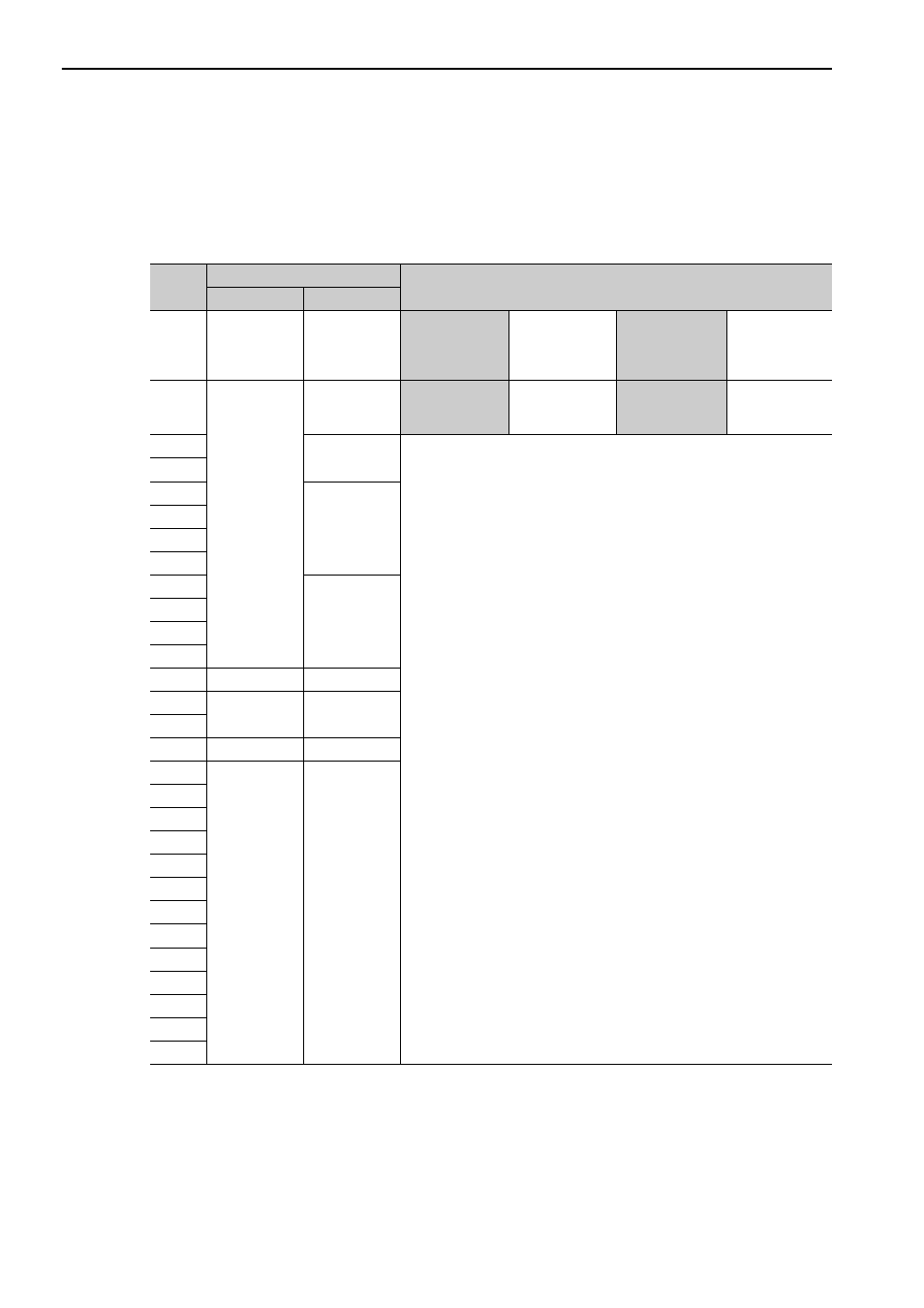
(1) SV_OFF Command (32H)
The specifications of the SV_OFF command are described below.
Byte
SV_OFF
Description
Command
Response
1
32H
32H
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
The time set in
Pn506
(500 ms max.)
Subcommand
Can be used
3
STATUS
• Stops current flow through the servomotor.
• When Pn829 (SVOFF waiting time at deceleration to stop) is set to a
value other than 0, the servo will be turned OFF after the servomotor
decelerates to a stop according to the deceleration constant for stopping
set by the parameter. (The servomotor decelerates to a stop in position
control mode.)
• When Pn829 (SVOFF waiting time at deceleration to a stop) is set to 0,
the servo will be turned OFF immediately after reception of this com-
mand.
(The control mode before receiving SV_OFF command remains
unchanged.)
• Executing the SV_OFF command will cancel the speed reference, speed
feed forward, torque (force) feed forward, and torque (force) limits set by
a position/speed control command.
4
5
MONITOR1
6
7
8
9
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
IO_MON
15
16
WDT
RWDT
17
Subcommand
area
Subcommand
area
18
19
20
21
22
23
24
25
26
27
28
29