2) related parameters – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 77
4 Motion Commands for Operation
4.2.5 Positioning (POSING: 35H)
4-12
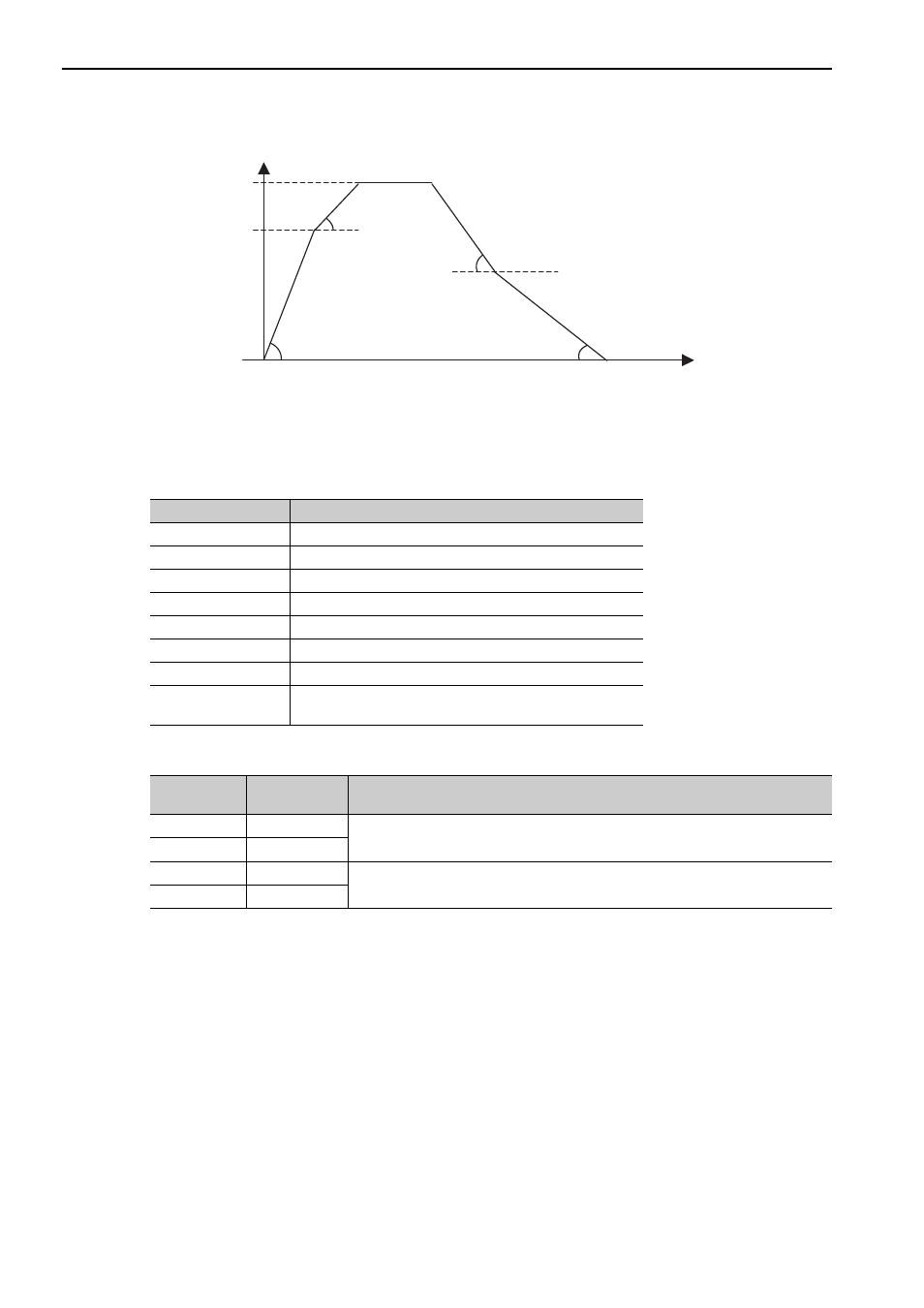
Positioning will be performed as illustrated below.
(2) Related Parameters
The parameters related to the execution of POSING command are listed below.
Parameter number in parentheses is when Pn833=1.
Set the parameters as shown below to use TLIM.
Command speed
Acceleration
constant
switching
speed
1st linear acceleration constant
2nd linear
acceleration constant
1st linear deceleration constant
TSPD
Time
2nd linear deceleration constant
Deceleration constant
switching speed
Parameter No.
Name
Pn80A (Pn834)
1st Linear Acceleration Constant
Pn80B (Pn836)
2nd Linear Acceleration Constant
Pn80C (Pn838)
Acceleration Constant Switching Speed
Pn80D (Pn83A)
1st Linear Deceleration Constant
Pn80E (Pn83C)
2nd Linear Deceleration Constant
Pn80F (Pn83E)
Deceleration Constant Switching Speed
Pn81F
Position Control Command TFF/TLIM Function Allocation
Pn002
Torque (Force) Reference Option During Speed/Position
Control
Parameter
No.
Set Value
Meaning
Pn81F
n.1
Enables forward/reverse torque (force) limit using TLIM.
Pn002
n.1
Pn81F
n.1
When P_CL of OPTION field is set to 1: Uses TLIM as positive torque (force) limit.
When N_CL of OPTION field is set to 1: Uses TLIM as negative torque (force) limit
Pn002
n.3