B general-purpose servo control command, Appendix b, Bgeneral-purpose servo control command – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 139
Appendix
A-4
B
General-purpose Servo Control Command
The specifications of general-purpose servo control command are described below.
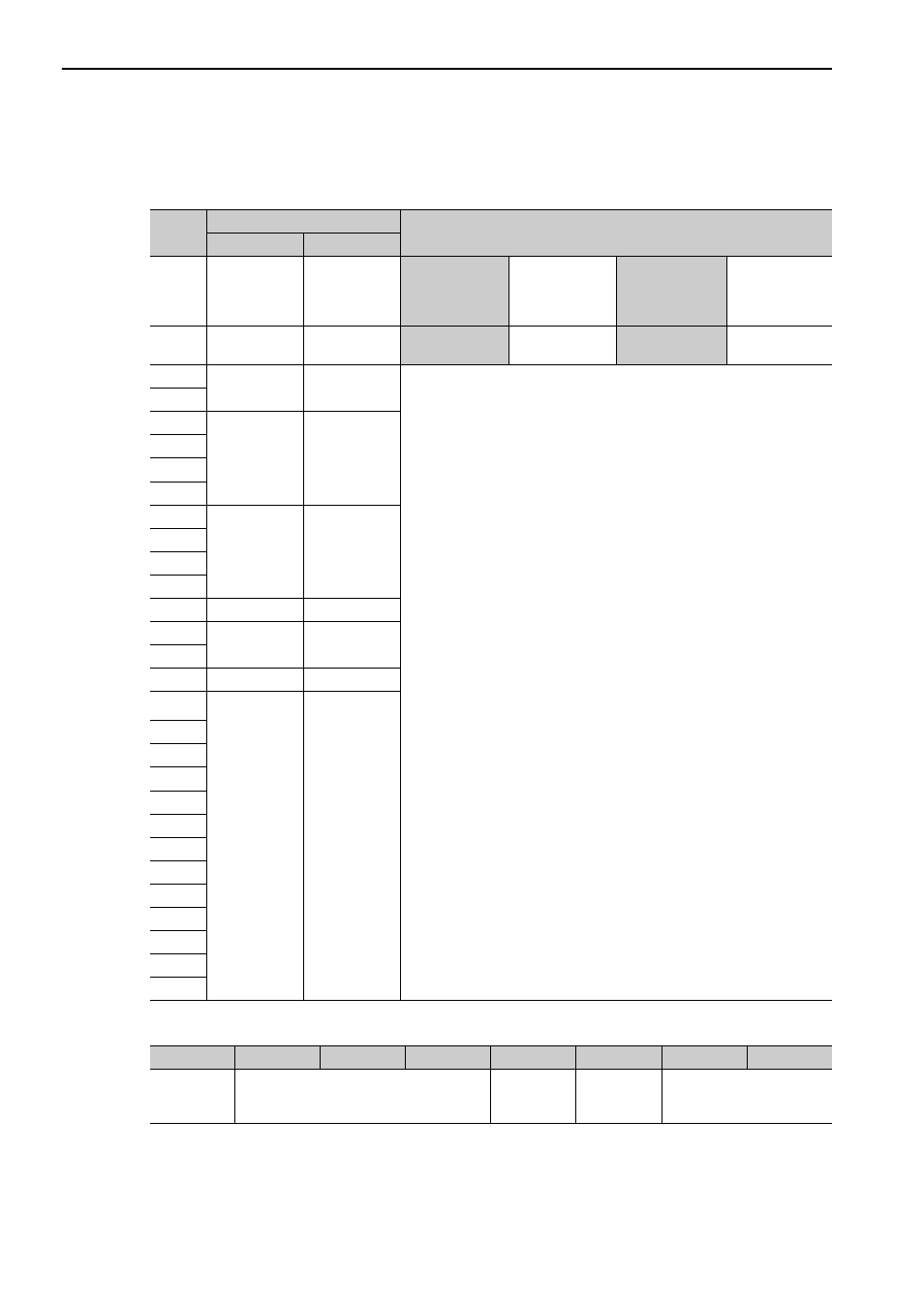
• Sub-control (SUBCTRL)
Byte
SVCTRL
Description
Command
Response
1
3FH
3FH
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
SUBCTRL
ALARM
Processing
time
Depends on pro-
cessing
Subcommand
Can be used
3
OPTION
STATUS
• This command is compatible with MECHATROLINK versions before
Ver 1.0. It is used to perform the general-purpose servo control.
• Latch Processing
Supported.
Select the latch signal using L_SGN in SUBCTRL and set SET_L to 1.
When the selected latch signal is input, L_CMP in STATUS field will
become 1.
Perform latch processing again after setting SET_L to 0.
The latch signal cannot be changed while SET_L = 1.
• Motion
Any of the motions selected for Motion Selection is executed.
• Sequence Signals
Any of the sequence signals listed in the following table is input.
4
5
TOPS
MONITOR1
6
7
8
9
TSPD/
VFF
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
SQ_CMD
IO_MON
15
16
WDT
RWDT
17
Subcommand
area
Subcommand
area
18
19
20
21
22
23
24
25
26
27
28
29
D7
D6
D5
D4
D3
D2
D1
D0
RESERVE 0
MOTION
Select motion
RESERVE 0
SET_L
Latch com-
mand
L_SGN
Select latch signal