17 set coordinate system (pos_set: 20h), 17 set coordinate system (pos_set: 20h) -30, 1) pos_set command (20h) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 61: 2) ps_subcmd specifications
3 Commands for Preparation Process
3.2.17 Set Coordinate System (POS_SET: 20H)
3-30
3.2.17 Set Coordinate System (POS_SET: 20H)
Send a POS_SET command to set the position coordinate system.
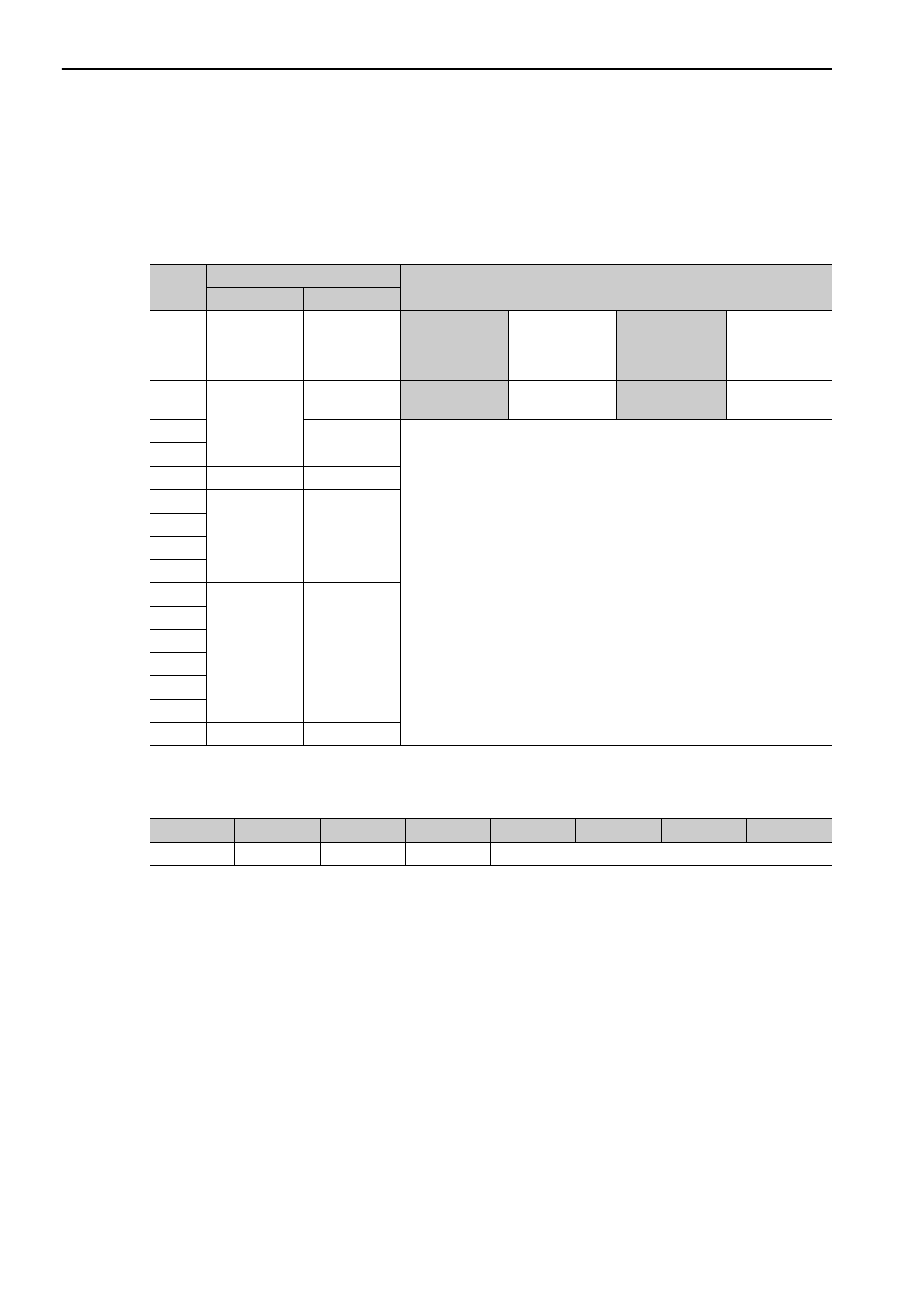
(1) POS_SET Command (20H)
The specifications of the POS_SET command are described below.
(2) PS_SUBCMD Specifications
The specifications of PS_SUBCMD are described below.
• REFE (Reference Point Setting)
0: Does not set reference point.
1: Sets reference point. The coordinates will be determined and the zero point position (ZPOINT) and soft-
ware limit setting will be enabled.
• POS_SEL (Coordinate system selection)
3: Sets APOS (feedback position in machine coordinate system), and sets the positions of all coordinate sys-
tems (TPOS, IPOS, POS, MPOS, APOS) to POS_DATA.
Byte
POS_SET
Description
Command
Response
1
20H
20H
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
Within commu-
nications cycle
Subcommand
Cannot be used
3
STATUS
• Sets the current position to the position specified by POS_DATA.
• The origin (ZPOINT) and software limit settings are enabled by setting a
reference point.
• See (2) PS_SUBCMD Specifications for details on PS_SUBCMD.
• Specify the position (coordinates) in POS_DATA.
• A warning will occur and the command will be ignored in the following
cases.
- A number out of the range is set in PS_SUBCMD: Data setting warn-
ing 2 (A.94B)
4
5
PS_SUBCMD PS_SUBCMD
6
POS_DATA
POS_DATA
7
8
9
10
11
12
13
14
15
16
WDT
RWDT
D7
D6
D5
D4
D3
D2
D1
D0
REFE
0
0
0
POS_SEL