1 commands list for preparation process, 1 commands list for preparation process -2 – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 33
3 Commands for Preparation Process
3-2
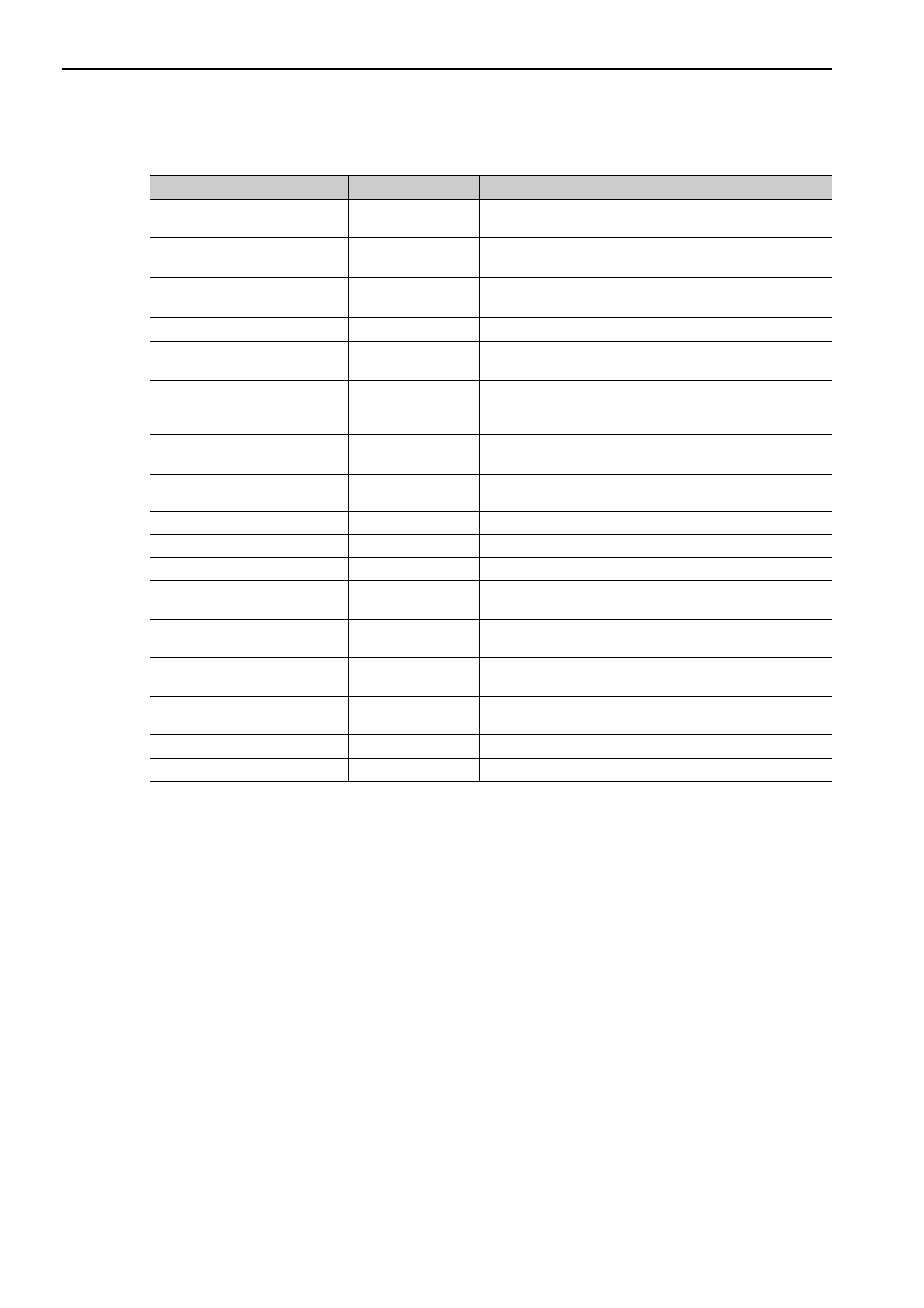
3.1 Commands List for Preparation Process
Operation
Command to Send
Description
Confirmation of completion of
SERVOPACK initialization
NOP, DISCONNECT Checks if the SERVOPACK has been initialized to be ready
for communications or not.
Establishment of MECHA-
TROLINK-II connection
CONNECT
Establishes communications connection and starts WDT
count.
Synchronous communications
start
SYNC_SET
Starts synchronous communications.
Device ID check
ID_RD
Checks information such as device ID.
Parameter setting
PRM_WR
Sets the parameters required for device. (When parameters
are managed by a controller)
Parameter setting and saving
PPRM_WR
Sets the parameters required for device and saves them in the
non-volatile memory. (When parameters are managed by
SERVOPACK.)
Validation of parameter settings
(Setup)
CONFIG
Enables the set parameters.
Encoder power supply ON
SENS_ON
Turns on the encoder power supply to get position data.
Servo ON
SV_ON
Turns the servo on.
Encoder power supply OFF
SENS_OFF
Turns off the encoder power supply off.
Servo OFF
SV_OFF
Turns the servo off.
Parameter read-out
PRM_RD
Reads active parameters.
(When parameters are managed by a controller)
SERVOPACK status monitoring
SMON
Monitors the SERVOPACK status.
Alarm and warning read-out
ALM_RD
Reads the current alarm or warning and the alarm occurrence
history.
Clearing alarm or warning status ALM_CLR
Clears the current alarm or warning status and the alarm
occurrence history.
Coordinate system setting
POS_SET
Sets the coordinate system.
Data monitoring and adjustment
ADJ
Monitors and adjusts the set data.