11 torque (force) control (trqctrl: 3dh), 11 torque (force) control (trqctrl: 3dh) -23, 1) trqctrl (3dh) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 88
4.2 Motion Commands Details
4-23
4
Motion Commands for Operation
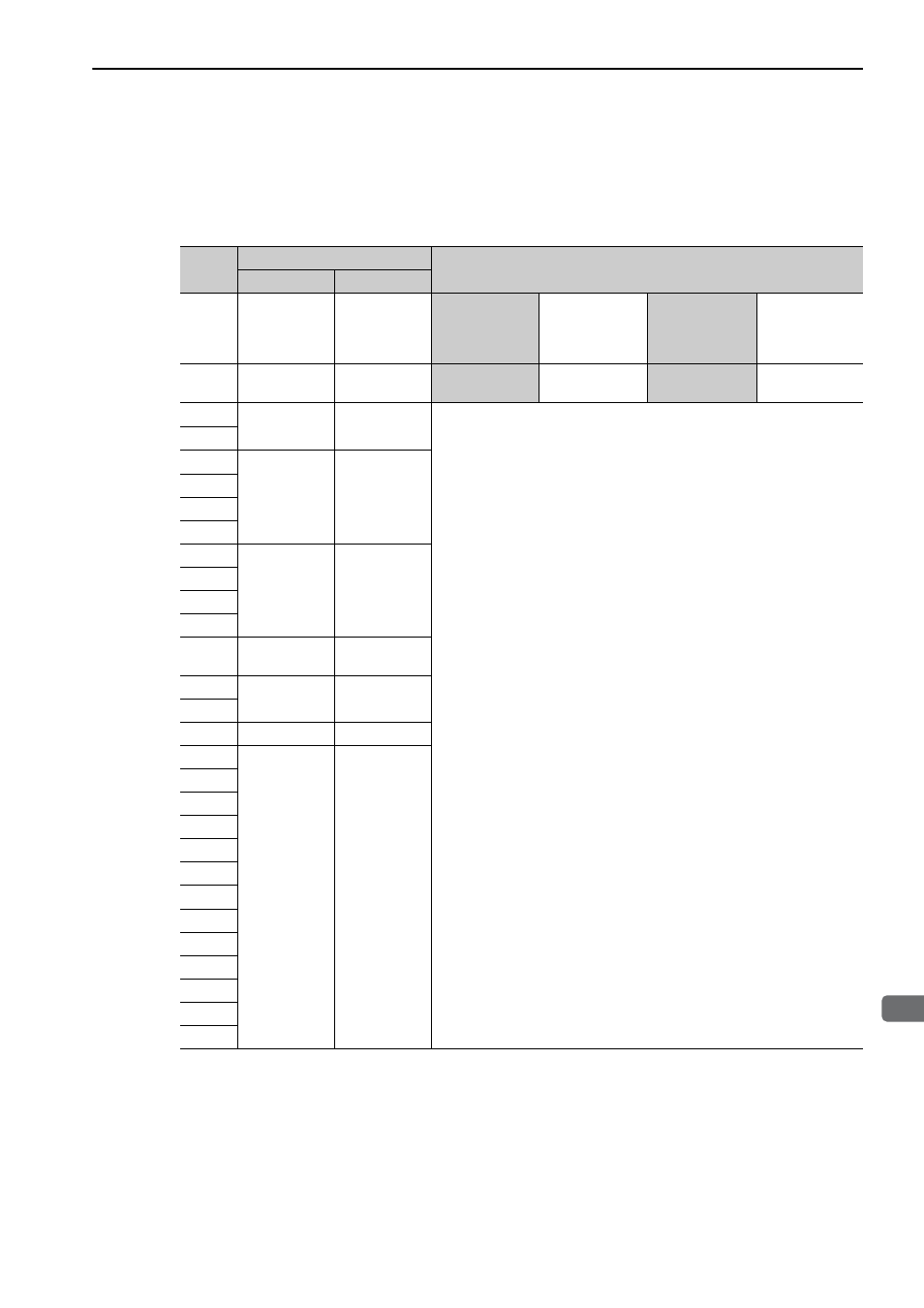
4.2.11 Torque (Force) Control (TRQCTRL: 3DH)
(1) TRQCTRL (3DH)
The TRQCTRL command is used to control torque (force). (The Servo does not perform position control and
speed control, but directly performs torque (force) control.)
Byte
TRQCTRL
Description
Command
Response
1
3DH
3DH
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
Within commu-
nications cycle
Subcommand
Can be used
3
OPTION
STATUS
• OPTION field can be used.
• VLIM is a speed limit value and has an unsigned 4-byte data.
The unit for the speed limit is [maximum motor speed /40000000H].
(Set Pn002 to enable VLIM.)
Use the ADJ command to obtain the maximum motor speed.
• TQREF is a torque (force) reference and has a signed 4-byte data.
The unit for torque (force) reference is [maximum motor torque (force)/
40000000H]. The direction is specified by the sign.
When the designation for TQREF exceeds the maximum motor torque
(force), it is clamped at the maximum motor torque (force).
Use ADJ command to obtain the maximum motor torque (force).
• During execution of this command, the following bits of STATUS field
are allocated.
D11: V_LIM (speed limit bit)
0: Speed limit not detected
1: Speed limit detected
• Monitor (MONITOR 1, 2, 3, 4)
The unit for TRQ is [maximum motor torque (force)/40000000H].
4
5
VLIM
MONITOR1
6
7
8
9
TQREF
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
IO_MON
15
16
WDT
RWDT
17
Subcommand
area
Subcommand
area
18
19
20
21
22
23
24
25
26
27
28
29