1 mechatrolink-ii subcommands list, 2 mechatrolink-ii subcommands details, 1 no operation (nop: 00h) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 115: 1 mechatrolink, 2 mechatrolink, 1 no operation (nop: 00h) -2, 1 mechatrolink-ii subcommands list -2, 2 mechatrolink-ii subcommands details -2, 1) substatus field specification
6 MECHATROLINK-II Subcommands
6.2.1 No Operation (NOP: 00H)
6-2
6.1 MECHATROLINK-II Subcommands List
The MECHATROLINK-II subcommands can be used by specifying them with the CONNECT command
when MECHATROLINK-II communications starts.
The specifications of each MECHATROLINK-II subcommand are described below.
Refer to 1.2.3 Combination of MECHATROLINK-II Main Commands and Subcommands for information on
applicable combinations with main commands.
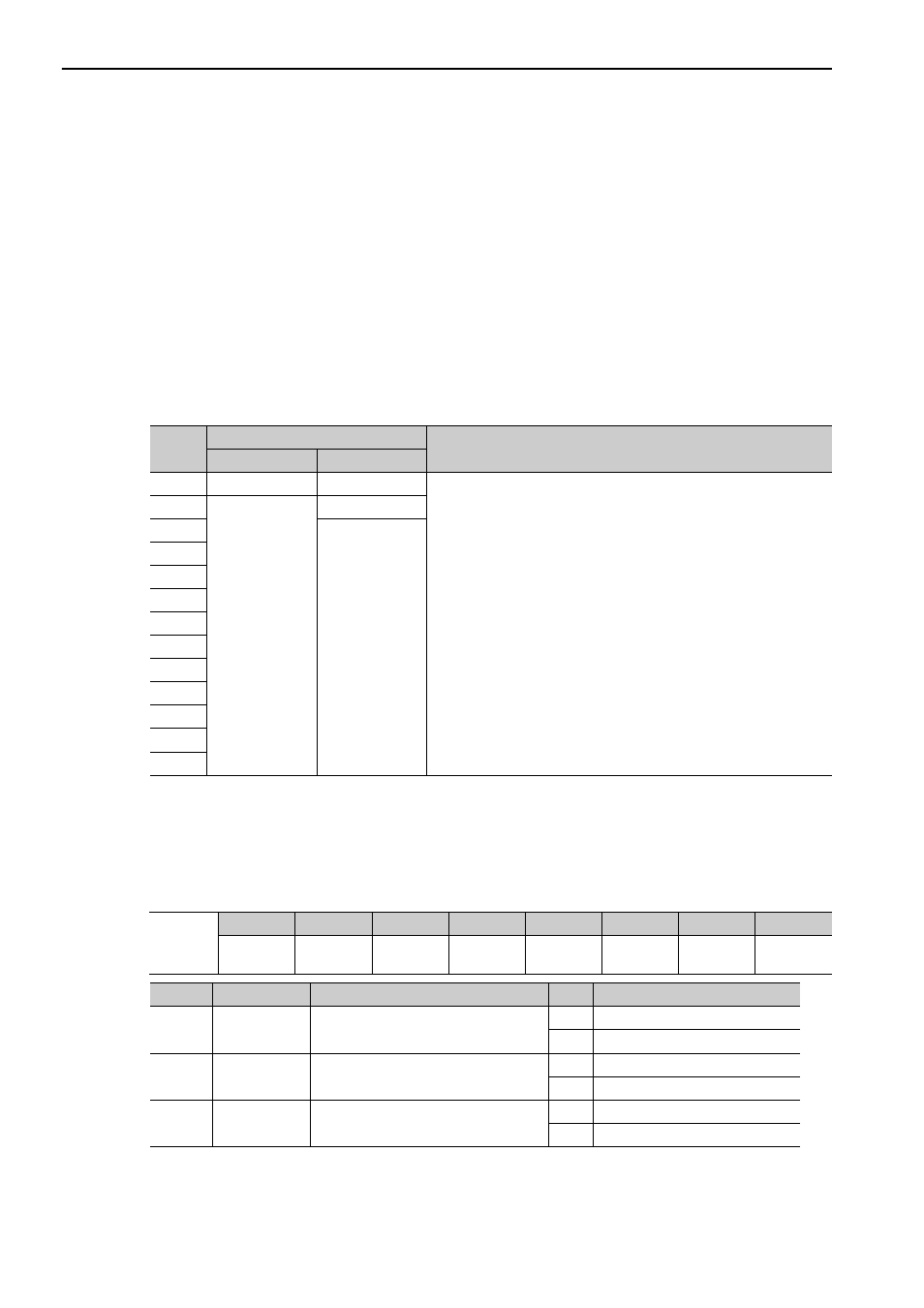
6.2 MECHATROLINK-II Subcommands Details
6.2.1 No Operation (NOP: 00H)
(1) Substatus Field Specification
This substatus field is used to monitor status of subcommands.
• Substatus Field
Byte
NOP
Description
Command
Response
17
00H
00H
• Not operation command
18
SUBSTATUS
19
20
21
22
23
24
25
26
27
28
29
Byte
18
D7
D6
D5
D4
D3
D2
D1
D0
Reserved
Reserved
Reserved
Reserved
Reserved
SBCM-
DRDY
SBWARNG
SBALM
Bit
Name
Description
Value
Status
D0
SBALM
Subcommand alarm occurs.
0
No alarm
1
Alarm occurs
D1
SBWARNG
Subcommand warning occurs.
0
No warning
1
Warning
D2
SBCMDRDY
Subcommand Ready
(Subcommand can be received)
0
Busy
1
Ready