1 motion commands list, 1 motion commands list -2 – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 67
4 Motion Commands for Operation
4-2
4.1 Motion Commands List
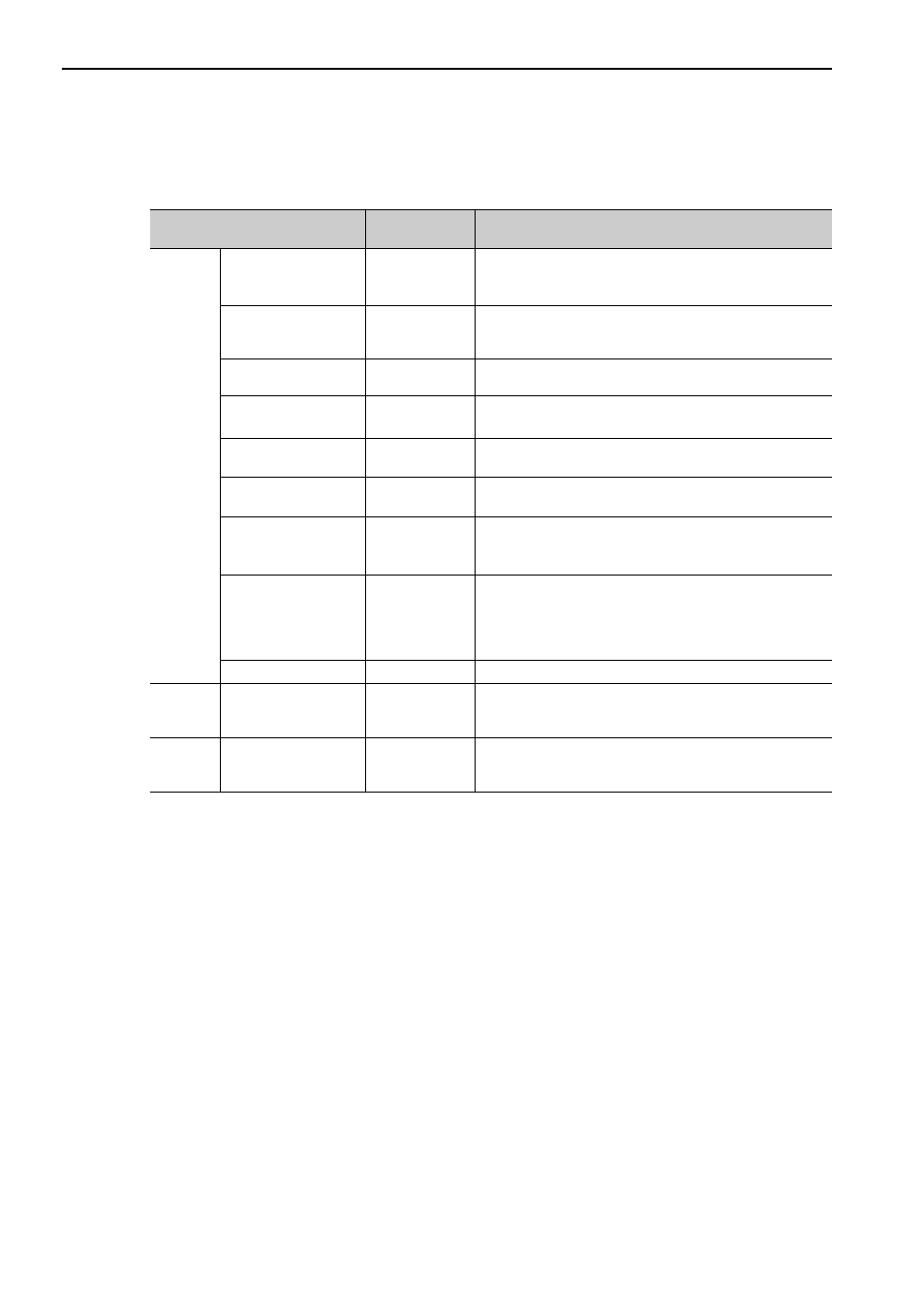
The motion commands described in this chapter are listed below.
Items
Command to
Send
Description
Position
Control
Stop Motion
HOLD
From current motion status, performs a deceleration stop in
the set pattern and positioning.
Set Latch Mode
LTMOD_ON
Requests the latch mode. If a latch signal is input in latch
mode, position latching will be performed.
Release Latch Mode
LTMOD_OFF
Releases the latch mode.
Interpolation Feed
INTERPOLATE
Starts interpolation feeding.
Positioning
POSING
Performs positioning to the target position (TPOS) at the tar-
get speed (TSPD).
Constant Speed Feed
FEED
Performs constant speed feeding in position by position con-
trol.
Interpolation Feeding
with Position Detection LATCH
Performs interpolation feeding and latches the position when a
external signal is input.
External Input Position-
ing
EX_POSING
Moves toward the target position (TPOS) at the target speed
(TSPD). When a latch signal is input midway, positioning is
performed according to the final travel distance for external
position specified in the parameter from the latch signal input
position.
Homing
ZRET
Performs a homing.
Speed
Control
Velocity Control
VELCTRL
Controls speed.
(The SERVOPACK does not perform position control, but
directly controls the speed of the speed loop.)
Torque
(Force)
Control
Torque (Force) Control TRQCTRL
Controls torque (force).
(The SERVOPACK does not perform position control and
speed control, but directly performs torque (force) control.)