5 positioning (posing: 35h), 5 positioning (posing: 35h) -11, 1) posing command (35h) – Yaskawa Sigma-5 User Manual: MECHATROLINK-II Commands User Manual
Page 76
4.2 Motion Commands Details
4-11
4
Motion Commands for Operation
4.2.5 Positioning (POSING: 35H)
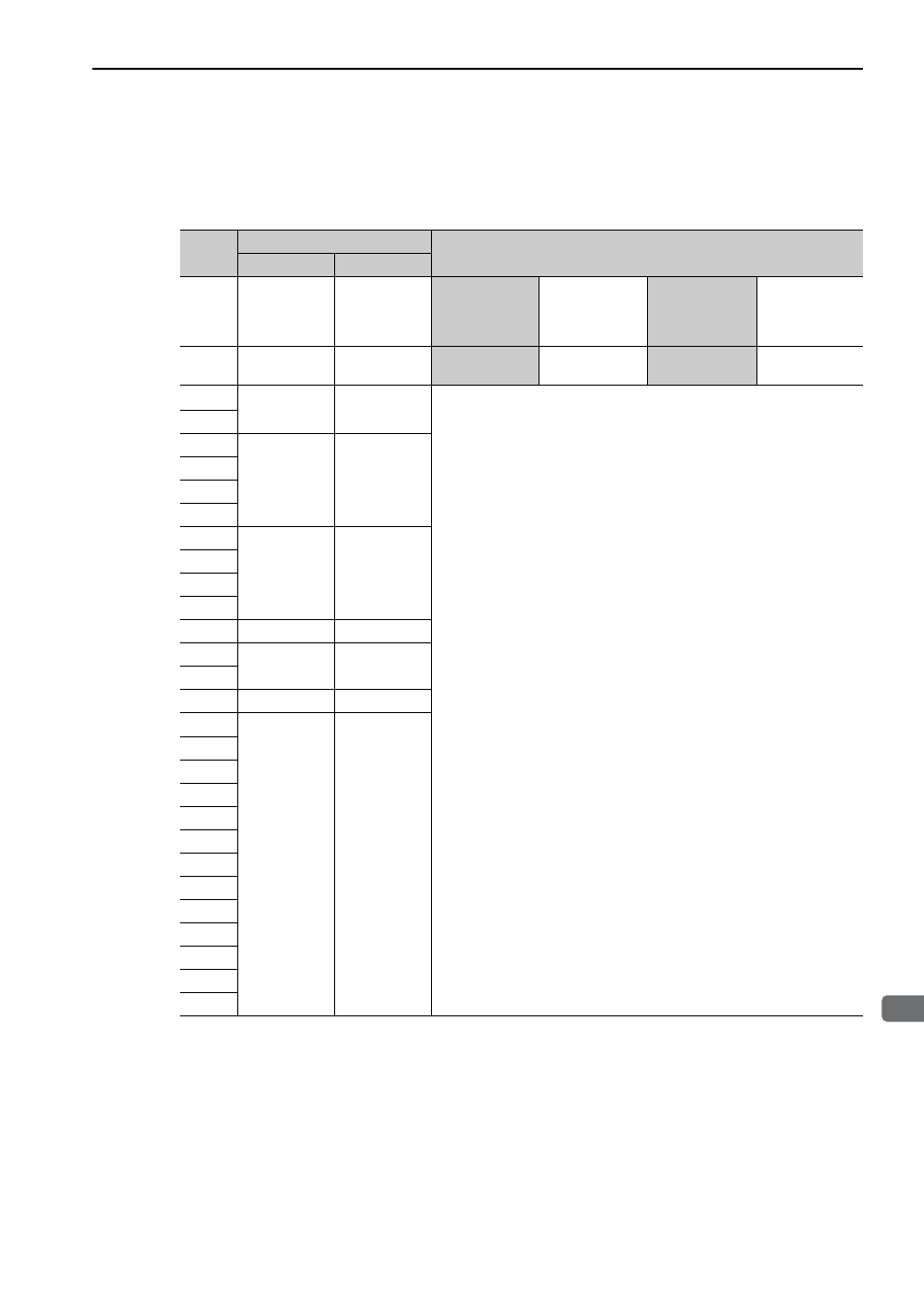
(1) POSING Command (35H)
The POSING command is used to start positioning to the target position (TPOS) at the target speed (TSPD).
Byte
POSING
Description
Command
Response
1
35H
35H
Phases in
which the
command can
be executed
Phase 2 and 3
Synchronization
classification
Asynchronous
command
2
ALARM
Processing
time
Within commu-
nications cycle
Subcommand
Can be used
3
OPTION
STATUS
• OPTION field can be selected.
• The target position (TPOS) is a signed 4-byte data.
It is sent by using an absolute position in the reference coordinate system.
Set the target position (TPOS) so that the movement distance (TPOS -
IPOS) is 2,147,483,647 (
=
2
31
-1) or less.
• Set the target speed (TSPD) to a value between 0 and the motor max.
speed [reference unit/s].
• Changes can be made to the target position and target speed during move-
ment.
• The torque (force) limit (TLIM) can be used by setting Pn81F and Pn002.
- TLIM setting range: 0 to 4000H [maximum motor torque (force)/
4000H]
If TLIM is set to a value between 4000H and FFFFH, the maximum
motor torque (force) will be applied as the limit.
Use the ADJ command to obtain the maximum motor torque (force).
• Use DEN (output complete) to confirm the completion of position refer-
ence output.
• A warning will occur and the command will be ignored in the following
case.
- This command is used while the servo is OFF: Command warning 1
(A.95A)
- The target speed (TSPD) exceeds the limit: Data setting warning 2
(A.94B)
- When using SigmaWin or a digital operator for motor operations such
as JOG: Command warning 1 (A.95A)
4
5
TPOS
MONITOR1
6
7
8
9
TSPD
MONITOR2
10
11
12
13
SEL_MON1/2 SEL_MON1/2
14
TLIM
IO_MON
15
16
WDT
RWDT
17
Subcommand
area
Subcommand
area
18
19
20
21
22
23
24
25
26
27
28
29