Dgps – Wavecom W-SPECTRA (Automatic Monitoring System) V1.1.0 User Manual
Page 101
WAVECOM Monitoring System W-SPECTRA, W-SPEED Manual V1.1.0
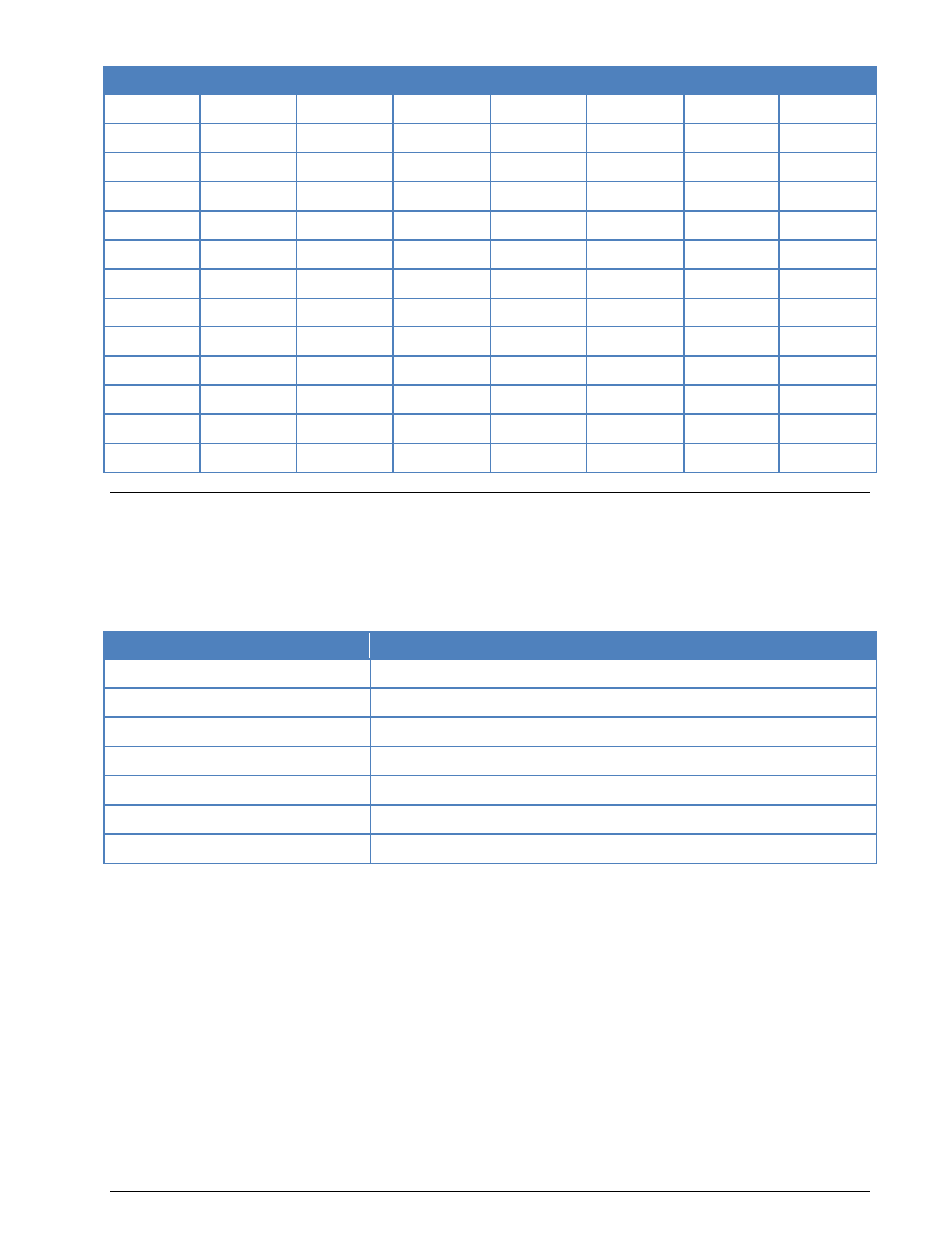
Transmission Modes
91
Normal
Inverse
Normal
Inverse
Normal
Inverse
Normal
Inverse
073
506
246
523
431
723
664
311
074
174
251
165
432
516
703
565
114
712
252
462
445
043
712
114
115
152
255
446
446
255
723
431
116
754
261
732
452
053
731
155
122
225
263
205
454
266
732
261
125
365
265
156
455
332
734
371
131
364
266
454
462
252
743
654
132
546
271
065
464
026
754
116
134
223
274
145
465
331
143
412
306
071
466
662
145
274
311
664
503
162
152
115
315
423
506
073
DGPS
DGPS (Differential Global Positioning System) data is mainly transmitted in the low frequency band e.g.,
285 - 315 kHz. It is a correction signal for GPS receivers, and is used to increase the accuracy of the sat-
ellite-based GPS signal. DGPS is based on the transmission of correction data by a reference station, the
position of which has been determined with high accuracy by traditional position-finding measurements.
With the correction data, an absolute accuracy to within 4 meters can be achieved.
Parameter
Value
Frequency range
HF
Operation modes
Broadcast FEC
Modulation
Minimum-Shift-FSK
Symbol rate
100.0 and 200.0 Bd
Receiver settings
DATA, CW, LSB or USB
Input format(s)
AF, IF
Additional Info
ITA-5
Transmissions use MSK (Minimum Shift Keying) with speeds of 100 or 200 baud.
DGPS has been implemented according to RTCM SC-104 "Recommended Standards for Differential
Navstar DGPS Service" v.2.0, Jan. 1990.
These messages are decoded: 1, 3, 7, 9, 13, 16.
These messages are NOT decoded, but their type is indicated: 2, 4, 5, 6, 8, 10, 11, 12, 14, 15,
17, 60-64.
Compared to M.823-2 messages 4 and 5 are not decoded by my implementation neither are the
equivalent GLONASS.
DGPS data, which is formatted according to RTCM v.2.0 or 2.1, is continuously transmitted in frames con-
sisting of a varying number of data words. The two first words of each frame contain the reference station
id, the message type, a sequence number, the frame length and the health of data. A data word has a
length of 30 bits: 24 data bits and 6 parity bits. The last two bits of a word are used as an EXOR function
for selected bits of the succeeding data word. The value of the last bit indicates whether the next data
word is sent with inverse or normal polarity.