4 torque control mode, 1 command source of torque control mode, 4 torque – Delta Electronics ASDA-B Series User Manual
Page 140: Control mode -25, Command source of torque control mode -25
Chapter 6 Control Modes of Operation|ASDA-B Series
Revision January, 2009
6-25
6.4 Torque
Control
Mode
The torque control mode (T or Tz) is usually used on the applications of torque control, such as printing
machine, spinning machine, twister, etc. Delta ASDA-B series servo drive supports two kinds of command
sources in torque control mode. One is external analog signal and the other is internal parameter. The
external analog signal is from external voltage input and it can control the torque of servo motor. The internal
parameters are from P1-12 to P1-14 which are used to be the torque command in torque control mode.
6.4.1 Command Source of Torque Control Mode
Torque command Sources:
1) External analog signal: External analog voltage input, -10V to +10V
2) Internal parameter: P1-12 to P1-14
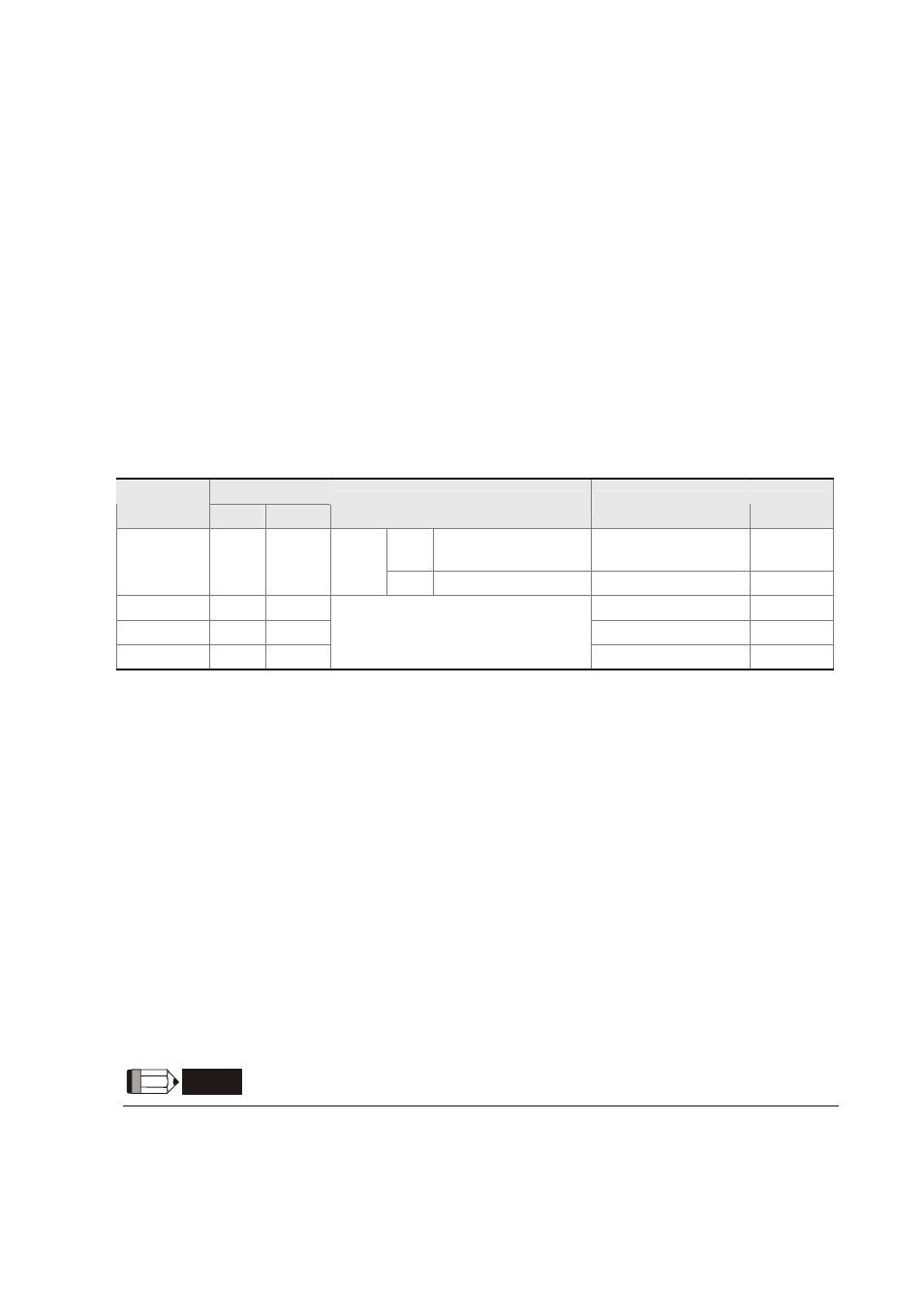
The command source selection is determined by the DI signal of CN1 connector. Please refer to the
Table 6.F below:
DI signal of CN1
Torque
Command TCM1 TCM0
Command Source
Content
Range
T External analog signal
Voltage between T-
REF-GND
+/- 10 V
T1 0
0
Mode
Tz
None
Torque command is 0
0
T2
0
1
P1-12
+/- 300 %
T3
1
0
P1-13
+/- 300 %
T4 1
1
Internal parameter
P1-14
+/- 300 %
Table 6.F
State of TCM0~1: 0: indicates OFF (Normally Open); 1: indicates ON (Normally Closed)
When TCM0 and TCM1 are both 0 (OFF), if the control mode of operation is Tz, then the
command is 0. Therefore, if the users do not use analog voltage as torque command, the users
can choose Tz mode to operation torque control to avoid the zero point drift problem
(Note1)
of
analog voltage. If the control mode of operation is T, then the command is the analog voltage
between T-REF and GND. The setting range of the input voltage is from -10V to +10V and the
corresponding torque is adjustable (see parameter P1-41).
When at least one of TCM0 and TCM1 is not 0 (OFF), the torque command is internal
parameter. The command is valid (enabled) after either TCM0 or TCM1 is changed.
The torque command that is described in this section not only can be taken as torque command in
torque control mode (T or Tz mode) but also can be the torque limit input command in position mode (P
mode) and speed control mode (S or Sz mode).
NOTE
1) In torque control mode, if the users want to adjust analog torque input offset value, please refer to
parameter 4-23 for the operation.