3 jog trial run without load, 1 asd-pu-01a tuning flowchart, 3 jog trial run without load -7 – Delta Electronics ASDA-B Series User Manual
Page 100: 1 asd-pu-01a, Tuning flowchart -7
Chapter 5 Trial Run and Tuning Procedure|ASDA-B Series
Revision January 2009
5-7
5.3 JOG Trial Run without Load
It is very convenient to use JOG trial run without load to test the servo drive and motor as it can save the
wiring. The external wiring is not necessary and the users only need to connect the digital keypad (ASD-PU-
01A or ASD-PU-01B) to the servo drive. For safety, it is recommended to set JOG speed at low speed.
Please refer to the following steps to perform JOG trial run without load.
5.3.1 ASD-PU-01A Tuning Flowchart
STEP 1: Turn the drive ON through software. Ensure that there is no fault message display on the LCD
display and the servo drive is normal.
STEP 2: Press JOG key on the keypad and the drive will enter into JOG operation mode automatically.
(At this time, the servo drive is enabled (Servo On).)
STEP 3: The users can press UP and DOWN key to change JOG speed and press SHIFT key to adjust
the digit number of the displayed value.
STEP 4: Pressing SET key can determine the speed of JOG operation.
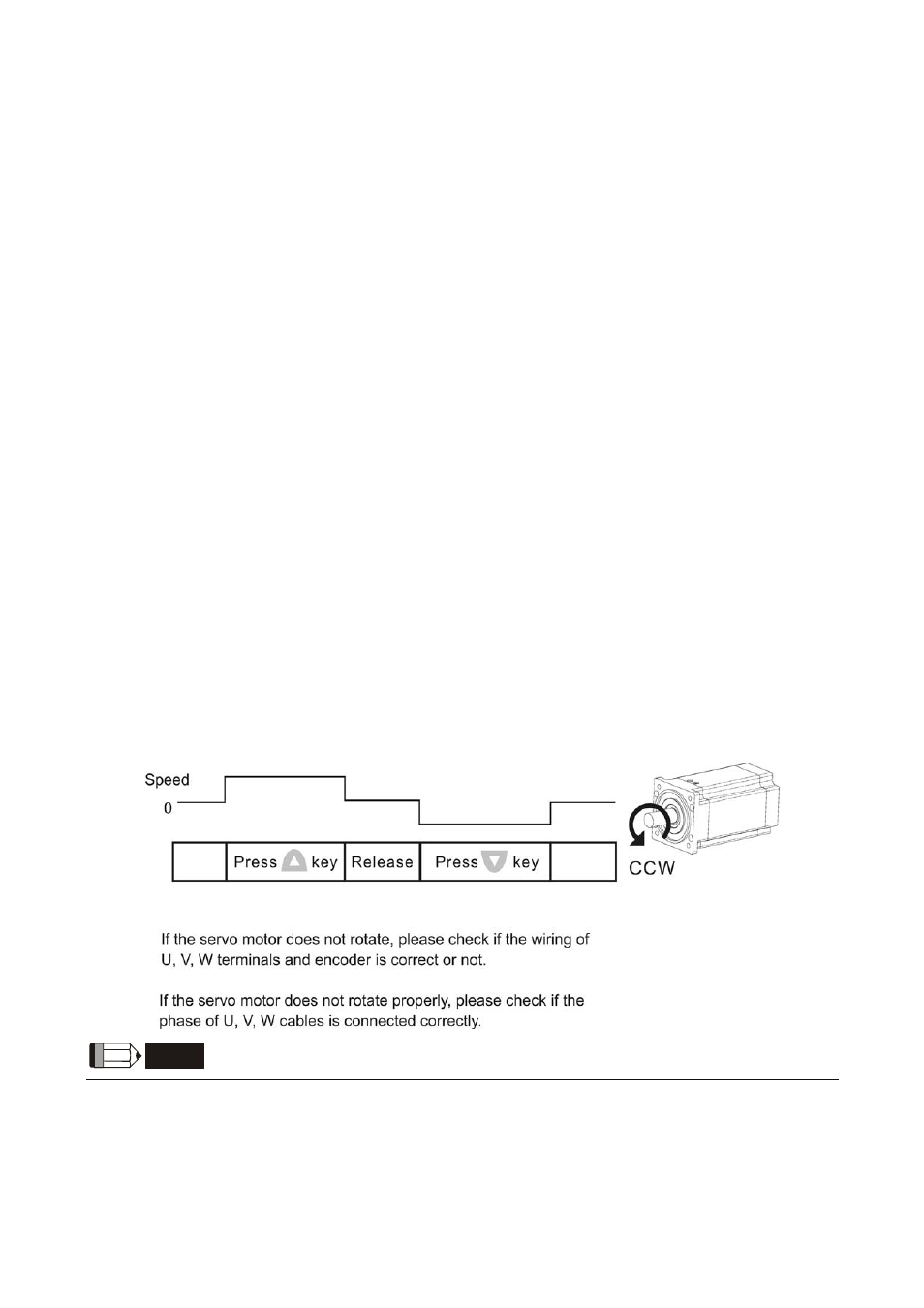
STEP 5: Pressing UP key and the servo motor will run in CCW direction. After releasing UP key, the
motor will stop running.
STEP 6: Pressing DOWN key and the servo motor will run in CW direction. After releasing DOWN key,
the motor will stop running.
CW and CCW Definition:
CCW (Counterclockwise): when facing the servo motor shaft, CCW is reverse running.
CW (Clockwise): when facing the servo motor shaft, CW is forward running.
STEP 7: When pressing MODE key, it can exit JOG operation mode.
NOTE
Please note that JOG operation cannot be used when EMGS occurs (ALE13, Emergency stop activated).
However, if CWL (ALE14, Reverse inhibit limit) or CCWL (ALE15, Forward inhibit limit) occurs during
JOG operation, the users can still use JOG operation without problem.
Please refer to the description of Section 4.1.5 in Chapter 4.