Rockwell Automation 160 DEVICENET (DN1) MODULE FRN 1-2.XX User Manual
Page 40
Publication 0160-5.5 - September 1997
Using 160-DN1 with DeviceNet Scanner
6-5
Pick Input and Output Assemblies
for the Bulletin 160
The DeviceNet Specification defines Assembly Objects as objects
that “bind attributes of multiple objects to allow data to or from each
object to be sent over a single connection.” The Bulletin 160 uses
Assembly Objects to send data to and from a Scanner over an IO con-
nection. The terms “Input” and “Output” are defined from the scan-
ner’s point of view. Bulletin 160 Output Assemblies are defined as the
information that is “output” by the scanner and consumed by the Bul-
letin 160. Input Assemblies are the status information that is con-
sumed by the scanner or are the scanner’s “input.”
The Bulletin 160 allows the user to choose between various Input and
Output Assemblies, thereby choosing the data format of the messages
that are passed back and forth between the 160 and the scanner on the
IO connection. The Assemblies that are supported are numbered and
are part of a DeviceNet defined “Motor Control Hierarchy.” This
allows drives to directly replace motor starters or contactors on a net-
work without the need to reprogram the scanner. Information on the
data format of all Bulletin 160 Assemblies is given in Appendix B,
page B-18 to B-23.
DeviceNet parameters P22 - [Output Assembly] and P23 - [Input
Assembly] must be programmed with the proper output or input
assembly. Refer to page 5-6 for possible selections.
The choice of which Input and Output Assembly to use should be
based on what sort of information is appropriate in a particular sys-
tem. See Appendix B for a description of the various Input and Output
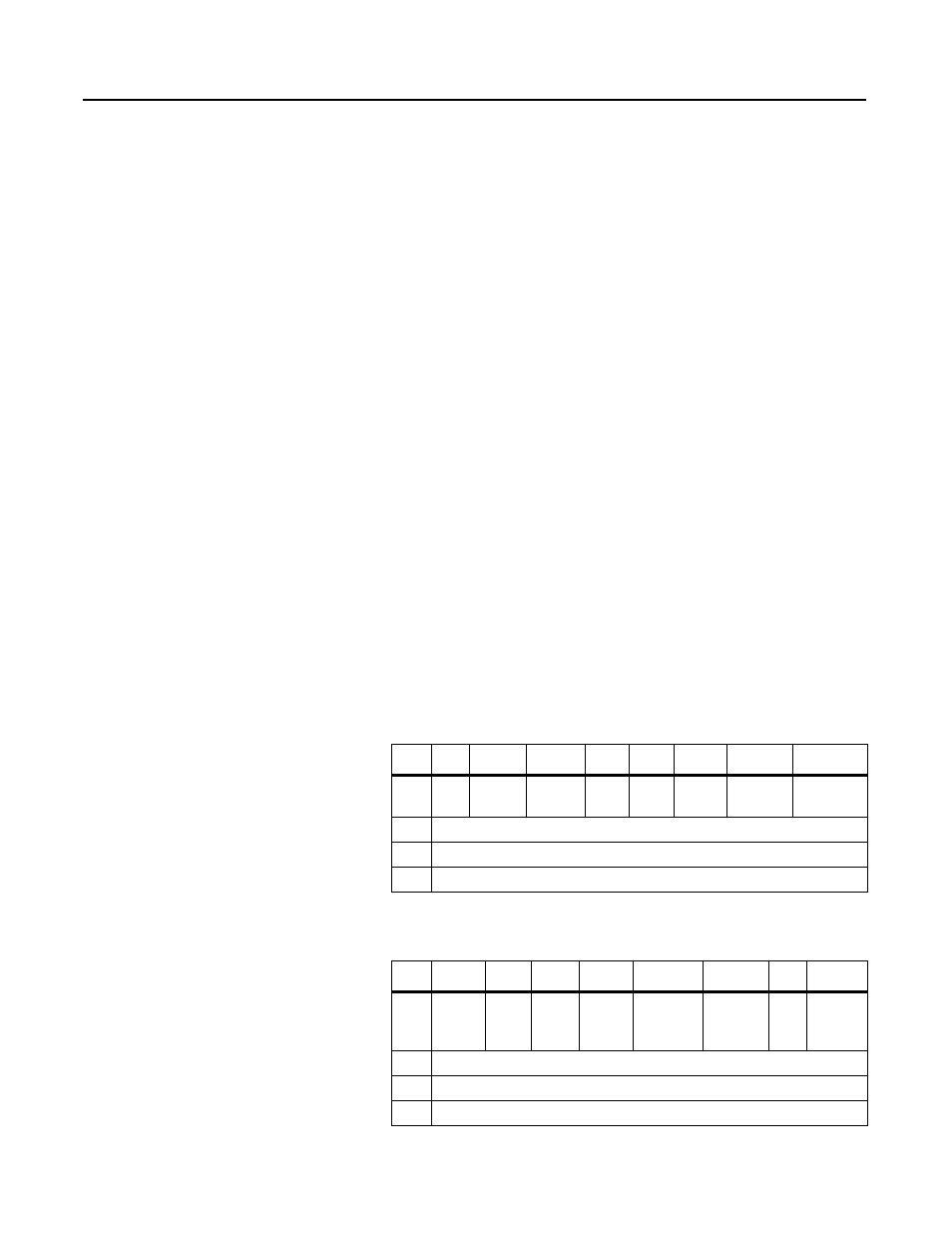
assemblies. In the example system, we will use Output Assembly 21
and Input Assembly 71. The data formats for these Assemblies are
given below:
Table 8: Assembly 21 Data Format
(Reversing Speed Control Output Assembly)
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
NetRef
Net
Control
Fault
Reset
RunRev
RunFwd
1
2
Speed Reference RPM (Low Byte)
3
Speed Reference RPM (High Byte)
Table 9: Assembly 71 Data Format
(Extended Speed Control Input Assembly)
Byte
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
0
At
Speed
Ref-
From
Net
Ctrl-
From
Net
Ready
Running
Reverse
Running
Forward
Faulted
1
2
Speed Actual RPM (Low Byte)
3
Speed Actual RPM (High Byte)