Devicenet parameters (continued) – Rockwell Automation 160 DEVICENET (DN1) MODULE FRN 1-2.XX User Manual
Page 32
Publication 0160-5.5 - September 1997
DeviceNet Parameter Descriptions
5-7
DeviceNet Parameters (Continued)
Parameter
Number
Name and Description
Object Mapping
(Class-Instance-
Attribute)
Min./Max.
Range
Factory
Default
26
[Assembly Word 2 Parameter]
This read/write parameter is used when P23 - [Input Assembly] is set to 102,
Custom Parameter Based Assembly or 105, Allen-Bradley Drive Assembly with
Parameters. It defines the third word in an assembly built from Bulletin 160
parameters. A 0 value defines the end of the assembly. For more information, see
Appendix B, pages B-22 and B-22.
0xB4-1-9
0 to 88
(0 to 9 for
version 1.2)
0
27
[Assembly Word 3 Parameter]
This read/write parameter is used when P23 - [Input Assembly] is set to 102,
Custom Parameter Based Assembly or 105, Allen-Bradley Drive Assembly with
Parameters. It defines the fourth word in an assembly built from Bulletin 160
parameters. A 0 value defines the end of the assembly. For more information, see
Appendix B, pages B-22 and B-22.
0xB4-1-10
0 to 88
(0 to 9 for
version 1.2)
0
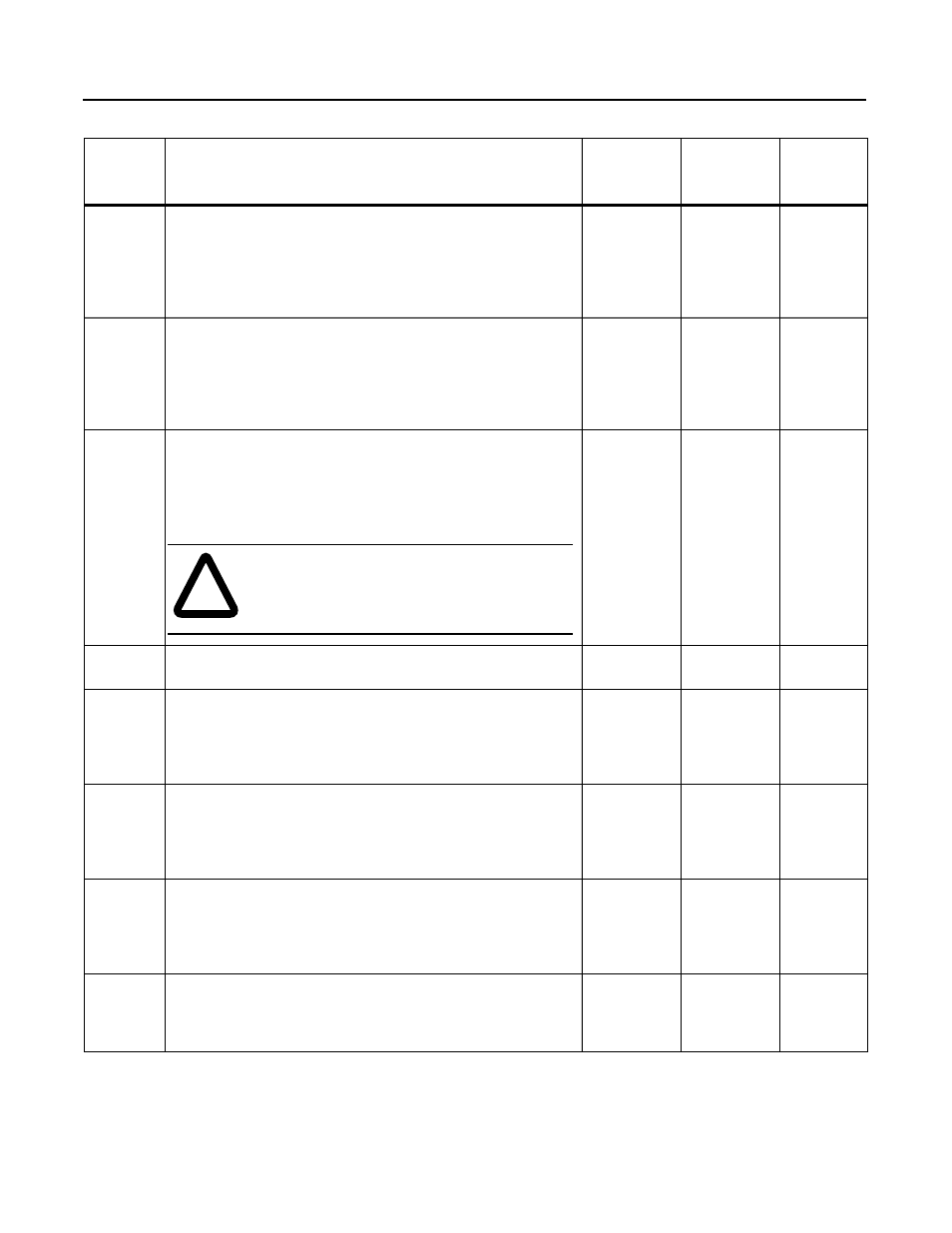
28
[DN Fault Mode]
This read/write parameter is used to determine the drive’s behavior when a com-
munication fault such as loss of DeviceNet power occurs. The following behavior
choices are used:
0 = Fault the drive and issue a stop command
1 = Ignore the communication fault
0x29-1-16
0 to 1
0
77
[Motor Base Speed]
This read/write parameter is set to the motor’s rated nameplate speed in RPM.
0x28-1-15
200 to 32000
1800 RPM
85
[DNet Idle Mode]
This Parameter, available with version 2.00 or later, controls the action of the
drive when the SDN Scanner is in Idle Mode.
0 = Stop if Idle Mode (default)
1 = Hold last state if Idle Mode
0xB4-1-11
0 to 1
0
86
[DNet Software Version]
This parameter, available with version 2.00 or later, indicates the software version
of the DeviceNet option. The number is in the form of xx.yy where xx indicates
the major revision level and yy indicates the minor revision level. This parameter
is read only.
0xB4-1-12
0.00 to 10.00
2.00
87
[Change of State Mask]
This parameter, available with version 2.00 or later, is a 16 bit mask used to
enable automatic change of state messages. A 0 disables the indicated status
from causing an automatic message. A 1 enables the status. The mask is applied
to the defined input status assembly. The default value is 0xFFFF.
0xB4-1-13
0 to 0xFFFF
0xFFFF
88
[Local Return Mode]
This parameter, available with version 2.00 or later, sets the input mode the drive
will use when transitioning from network to local control. This is only used with
input mode 2. Available values are 0, 1, 3, 4, and 5.
0xB4-1-14
0 to 5
0
!
ATTENTION: Ignoring communication faults may result in
equipment damage, personal injury, or death. Ensure that you
understand how ignoring a communication fault affects the
operation of your system.