Rockwell Automation 160 DEVICENET (DN1) MODULE FRN 1-2.XX User Manual
Page 100
Publication 0160-5.5 - September 1997
ODVA Interface Parameter Descriptions
C-9
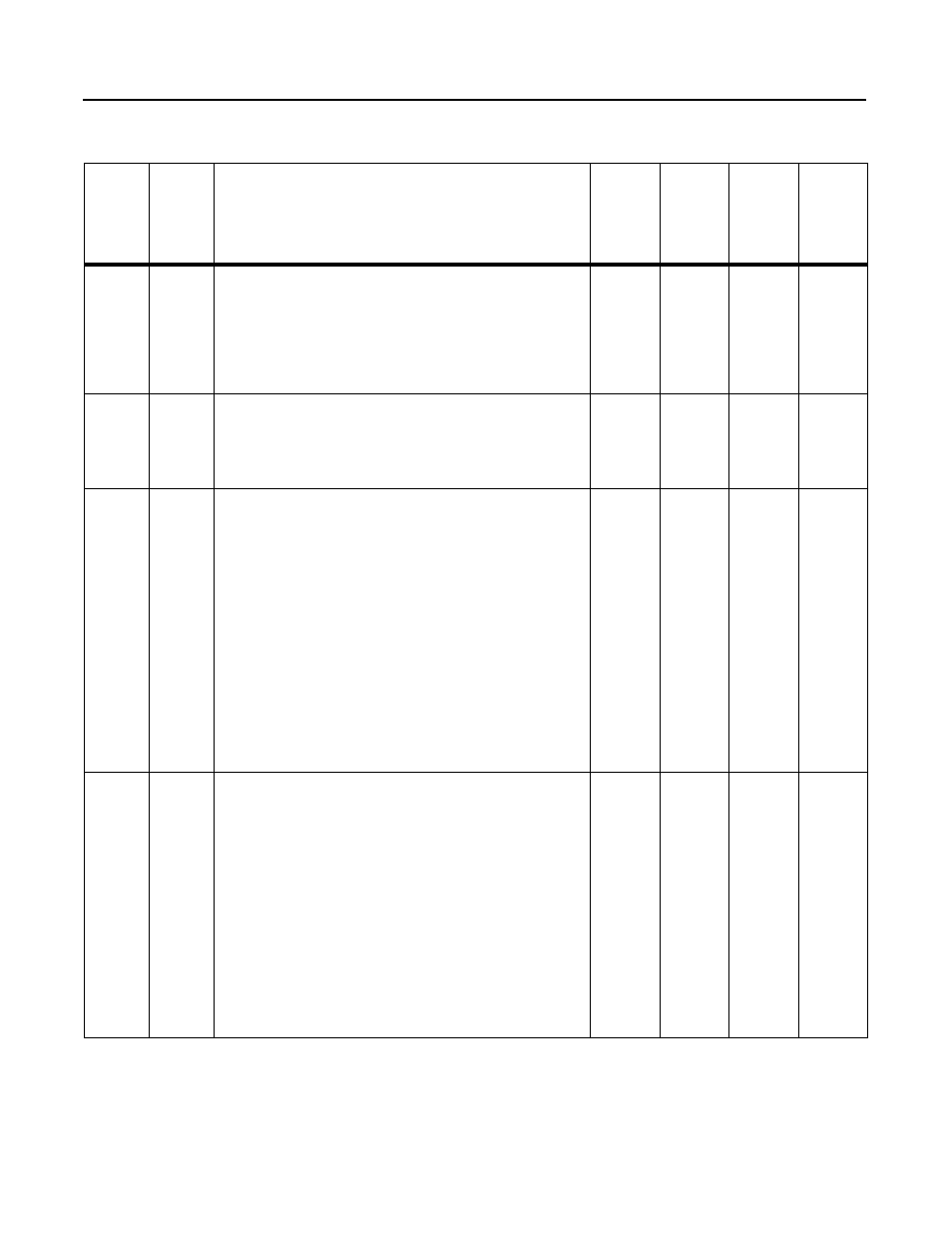
ODVA Drive Profile Interface
Parameters (Continued)
Parameter
Number
Parameter
Group
Name and Description
Object
Mapping
(Class-
Instance-
Attribute)
Min./Max.
Range
Units
Factory
Default
59
DeviceNet
Configura-
tion
[Bus Off Error]
This read/write parameter determines how the Communication Module
processes a CAN Bus Off condition. This parameter is mapped to
attribute 3 (BOI) of instance 1 of the DeviceNet Object.
0 = Hold CAN chip in its bus off (reset) state when bus off is detected.
1 = If possible, fully reset the CAN chip and continue communicating
when a bus off is detected.
0x03-1-3
0 to 1
Numeric
Value
0
60
DeviceNet
Configura-
tion
[Bus Off Count]
This read/write parameter counts the number of times the CAN chip went
to the bus off state. This counter stops counting when the count reaches
255. This parameter is mapped to attribute 4, instance 1 of the DeviceNet
Object.
0x03-1-4
0 to 255
Numeric
Value
0
61
DeviceNet
Configura-
tion
[Output Assembly]
This read/write parameter sets the output assembly instance that is to be
used for polled messaging with the master. The output assembly defines
the data format that the drive receives from the master. It is named output
assembly because the DeviceNet specification refers to all assemblies as
they relate to the master. The following assembly instances (described
fully in Appendix B) are valid for this parameter:
0 =
No Data.
1 =
Basic Contactor Output.
2 =
Two Command Contactor Output.
3 =
Basic Overload Output.
4 =
Basic Motor Control Output.
5 =
Reversing Motor Control.
20 =
Basic Speed Control.
21 =
Extended Speed Control.
101 =
Preset Control (preset units only).
0x29-1-100 0 to 101
Numeric
Value
20
62
DeviceNet
Configura-
tion
[Input Assembly]
This read/write parameter sets the input assembly instance that is to be
used for polled messaging with the master. The input assembly defines
the data format that the drive sends to the master in response to a polled
message from the master. It is named input assembly because the
DeviceNet specification refers to all assemblies as they relate to the mas-
ter. The following assembly instances (described fully in Appendix B) are
valid for this parameter:
0 =
No Data.
50 =
Basic Overload Input.
51 =
Extended Overload Input.
52 =
Basic Motor Control Input.
53 =
Extended Motor Control Input.
70 =
Basic Speed Control Input.
71 =
Extended Speed Control Input.
0x29-1-101 0 to 71
Numeric
Value
70