4 selecting the safety parameters, Selecting the safety parameters, Appendix – Lenze 931E/K Small Drives Control User Manual
Page 140
Appendix
Parameterisation of outside motors
Selecting the safety parameters
l
140
SW−HB 13.0002−EN 4.1
10.1.4
Selecting the safety parameters
In many applications, it is necessary to limit the accelerations, speeds and the traversing
range to "manageable" values to protect the mechanical components from overload.
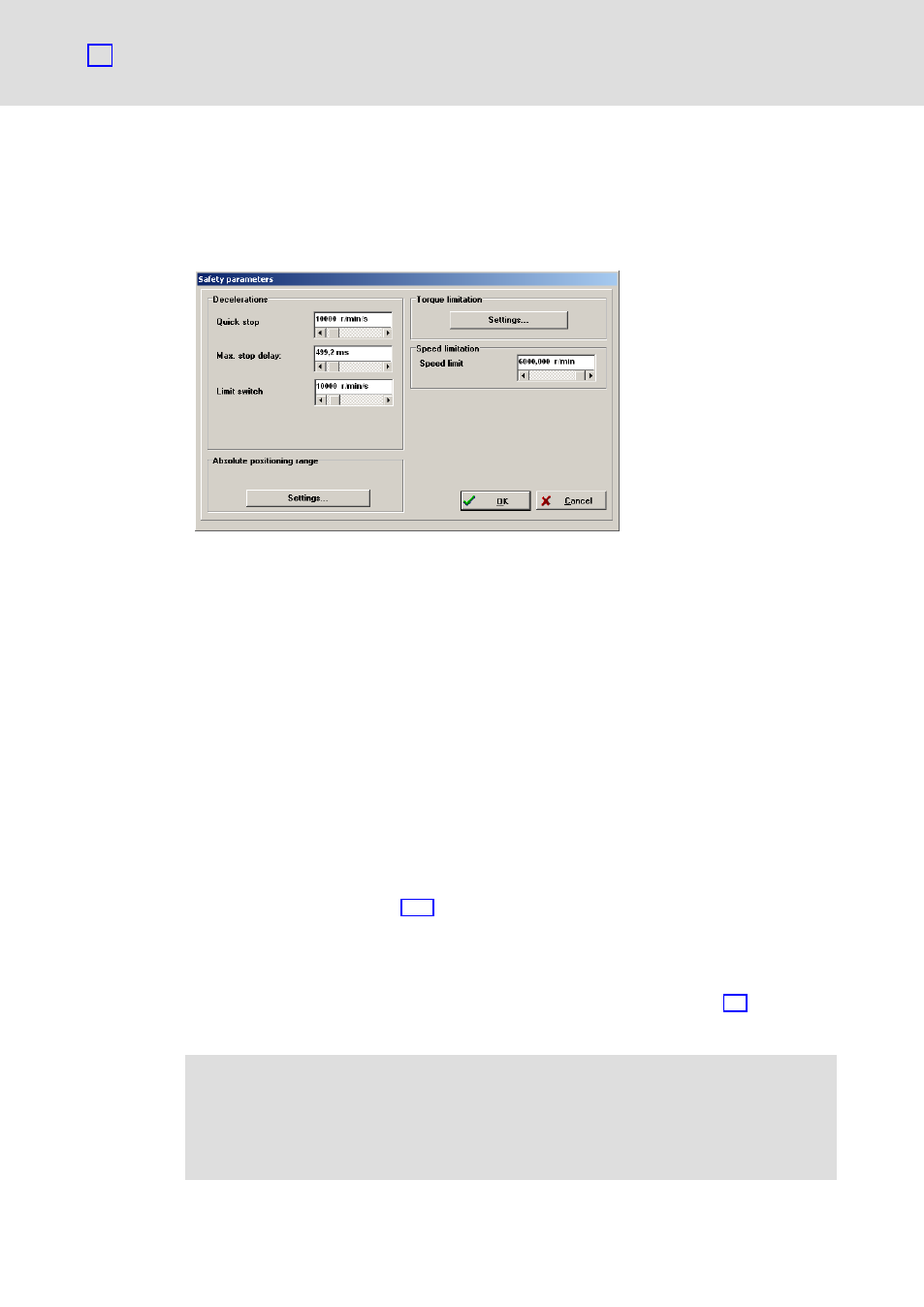
Select the menu Parameters
W Safety parameters to enter the setpoints limits.
931e_314
The following safety parameters can be configured in this window:
ƒ
Decelerations:
– Deceleration − quick stop: (If possible,) quick stop deceleration will be used when
controller enable is deactivated or if an error occurs.
– Deceleration − limit switch: Limit switch deceleration will be used when the drive
has reached a limit switch.
– Maximum stop delay: If controlled stopping has not been possible after
deactivation of controller enable (e.g. due to wrong parameter setting), the power
stage will be switched off after this time, the motor will coast to standstill unless it
has already been decelerated to zero.
ƒ
Speed limitation:
The speed setpoint will be limited to the set value.
ƒ
Torque limitation:
Click Settings to open the Motor data window. For more information, please see the
chapter "Motor data". (
¶ 133) Enter the limit value Maximum current in A, rms value
to select the torque limitation in ampere.
ƒ
Absolute positioning range:
Click Settings to open the Settings position sets
W Course program window. For more
information, please see the chapter "Global positioning settings". (
¶ 73)
Here you can define the maximum positioning range (SW limit−switch functionality).
)
Note!
Depending on the setting of the current, speed and position control circuits,
the set parameters may be exceeded for a short time as a result of control
"overshoots". This must be considered during system commissioning. If
necessary, the controllers must be optimised during real operation.