2 angle encoder, Angle encoder, Appendix – Lenze 931E/K Small Drives Control User Manual
Page 135
Appendix
Parameterisation of outside motors
Angle encoder
l
135
SW−HB 13.0002−EN 4.1
10.1.2
Angle encoder
The 931E/K servo positioning controller supports four angle encoder types.
ƒ
Resolvers with sin/cos signals
ƒ
Stegmann sin/cos encoders with hiperface interface (multi− and single−turn
encoders)
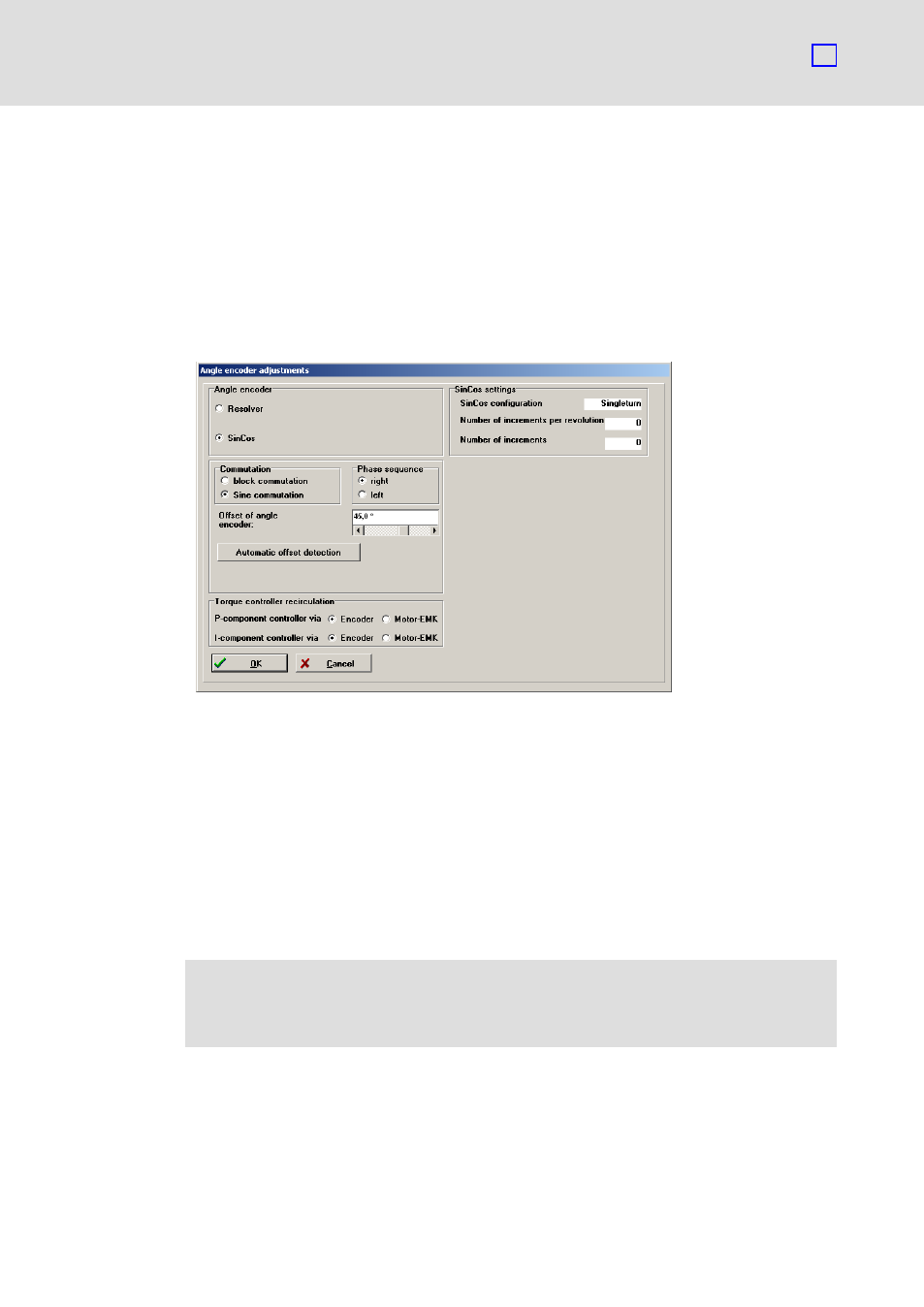
Select the menu Parameters
W Device parameters W Angle encoder adjustments to enter
the angle encoder parameters.
931e_280
Depending on the selected angle encoder, the menu may differ from the above example
menu because different setting options are used.
Motor and angle encoder can be identified automatically or manually. We recommend an
automatic adjustment if the motor has not yet been integrated into a system and the axis
can be freely moved.
The function can be activated via the following menus:
ƒ
Parameters
W Device parameters W Motor data: "Auto detect".
ƒ
Parameters
W Device parameters W Angle encoder adjustments: "Automatic offset
detection".
)
Note!
When using an absolute value encoder, press the "Save & reset" button after
encoder selection.
During the automatic angle encoder identification, the controller will be switched on for
several seconds and the motor directly driven with a controlled rotating field. The
automatic identification thus determines the following parameters:
ƒ
Pole pair number of the motor
ƒ
Angle encoder offset = offset between the zero mark of the encoder and the