3 communication times and drive-specific data, Communication times and drive-specific data, Control technology | ethercat communication manual – Lenze EtherCAT control technology User Manual
Page 35
DMS 3.1 EN 01/2011 TD17
L
35
Control technology | EtherCAT communication manual
Technical data
Communication times and drive-specific data
5.3
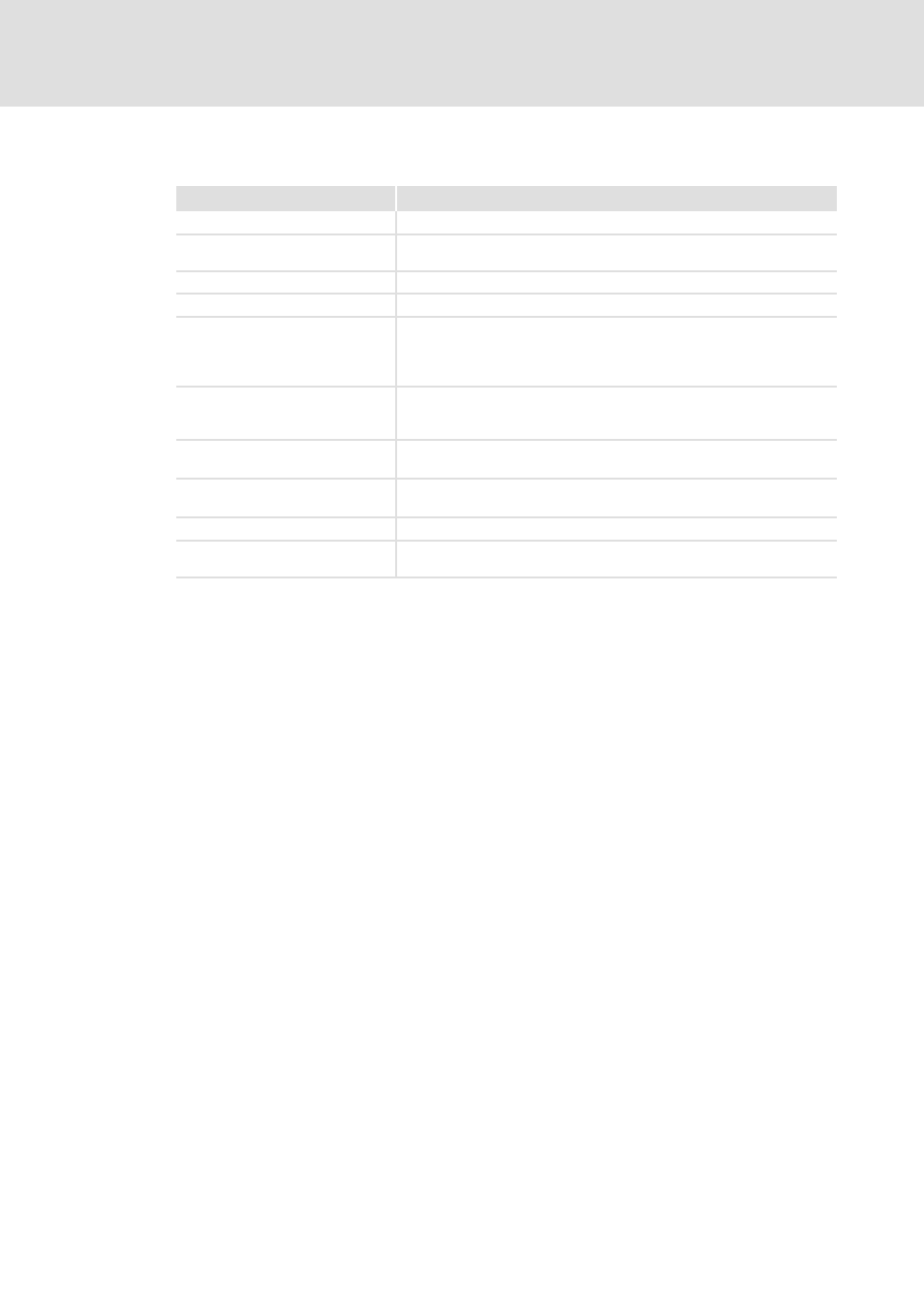
Communication times and drive-specific data
Field
Values
User data per frame
1344 bytes
Process data words (PZD) for Servo
Drives 9400 HighLine
max. 32 words (64 bytes)
Parameter data (SDO) transfer
Max. 128 bytes
Permissible EtherCAT cycle times
1 … 10 ms
Max. number of Servo Drives 9400
HighLine per frame
User data of the frame (1344 bytes) divided by the process data length
resulting from setpoints and actual values of the drives:
• for 32 Tx/Rx bytes: 1344 bytes / 64 bytes = 21 drives
• for 16 Tx/Rx bytes: 1344 bytes / 32 bytes = 42 drives
Total signal runtime for a cycle time
of 1ms
Drive
Control
Drive
5 ms
Runtime of the setpoints
Control
Drive
2 ms
Runtime of the actual values
Drive
Control
3ms
Cross communication
Not possible
Cycle synchronisation with locked
PLL (jitter)
+/-1 μs