4 notifications, A the, Notifications – Lenze EtherCAT control technology User Manual
Page 120: In the, S function block resets the, It is typically us, Control technology | ethercat communication manual
Control technology | EtherCAT communication manual
EtherCAT function libraries
Function blocks and functions for diagnosing the network
120
L
DMS 3.1 EN 01/2011 TD17
9.7.8.4
Notifications
If an event (information, warning, error) occurs on the EtherCAT bus system, the user or the
PLC program receives a "notification".
The notifications only provide information about the fact that an event of a certain type
has occurred.
In the »PLC Designer«, the notifications are implemented as boolean elements in the
global EtherCAT master structure ECAT_MASTER
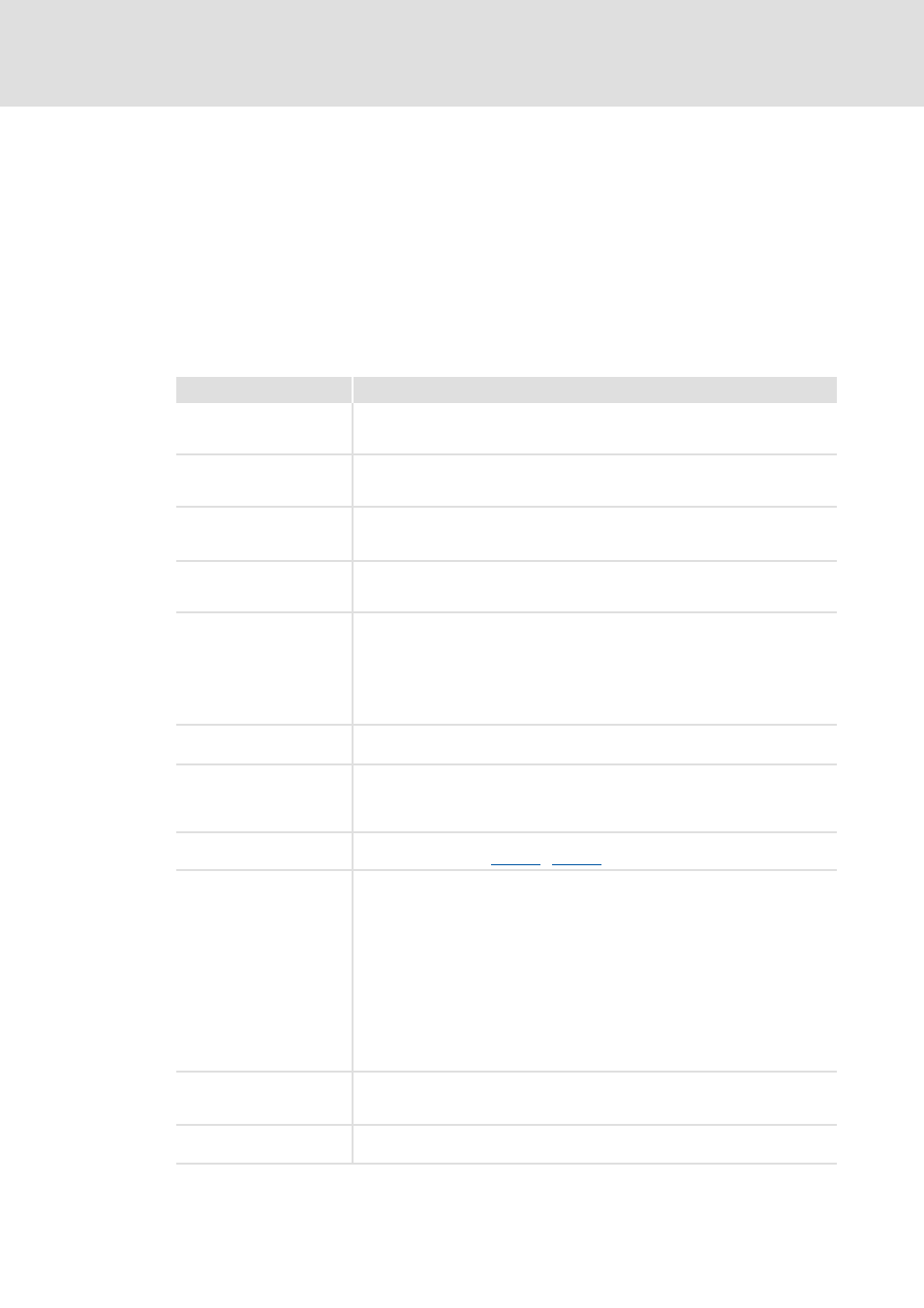
Overview of notifications
Notification
Description
bEC_NOTIFY_ETH_LINK_
CONNECTED
This notification is set when the interrupted connection between the EtherCAT
master and the first slave (see also bEC_NOTIFY_ETH_LINK_NOT_CONNECTED) is
restored.
bEC_NOTIFY_STATUS_
SLAVE_ERROR
When cyclic frames are processed, the EtherCAT master checks whether the ERROR
bit has been set in the AL-STATUS register of at least one of the slaves. If this is the
case, the error is indicated.
bEC_NOTIFY_RED_LINEBRK
Redundancy support (is currently not supported):
This notification is set for every bus/communication interruption detected by the
master (see also bEC_NOTIFY_ETH_LINK_NOT_CONNECTED).
bEC_NOTIFY_NOT_ALL_
DEVICES_OPERATIONAL
When cyclic frames are processed, the EtherCAT master checks that all slaves are still
in the Operational state. If at least one slave is not in the Operational state, this this
notification is set.
bEC_NOTIFY_ETH_LINK_
NOT_CONNECTED
This notification is set when the connection between the EtherCAT master and the
first slave is interrupted.
Note: A missing connection can only be detected directly at the master. If, for
instance, a switch or a multi-channel probe is connected downstream of the master
and the connection is interrupted downstream of these devices, missing frames
and/or the error message EC_NOTIFY_CYCCMD_WKC_ERROR are indicated. (This
only applies to the cabling directly at the master.)
bEC_NOTIFY_SB_STATUS
Bus state notification:
This notification is set when the EtherCAT bus is scanned.
bEC_NOTIFY_DC_STATUS
DC state notification:
This notification is either received after starting the master (ecatStart) or after
loading and then starting the PLC program, if all slave clocks have successfully been
updated with the compensation values for the transmission delay.
bEC_NOTIFY_DC_SLV_SYNC This notification is set when the maximum permissible DC deviation for the
connected slaves (code
) has been exceeded.
dwEC_NOTIFY_DC_SLV_
SYNCDeviation
Indicates the limit value of the DC deviation (in nanoseconds):
0: 1 ns
1: 3 ns
2: 7 ns
3: 15 ns
4: 31 ns
5: 63 ns
6: 127 ns
7: 255 ns
...
31:2147483647 ns
32: reserved
bEC_NOTIFY_DCL_STATUS
DC latching state notification:
This notification is set after the master has been started (ecatStart) and the DC latch
instance has been initialised correctly.
bEC_NOTIFY_DCL_SLV_
LATCH_EVT
DC latch notification (single mode):
This notification is set when a slave generates a latch event in "single latch mode".