1 the ethercat state machine, Control technology | ethercat communication manual – Lenze EtherCAT control technology User Manual
Page 19
DMS 3.1 EN 01/2011 TD17
L
19
Control technology | EtherCAT communication manual
The Lenze control system with EtherCAT
Brief description of EtherCAT
4.1.3.1
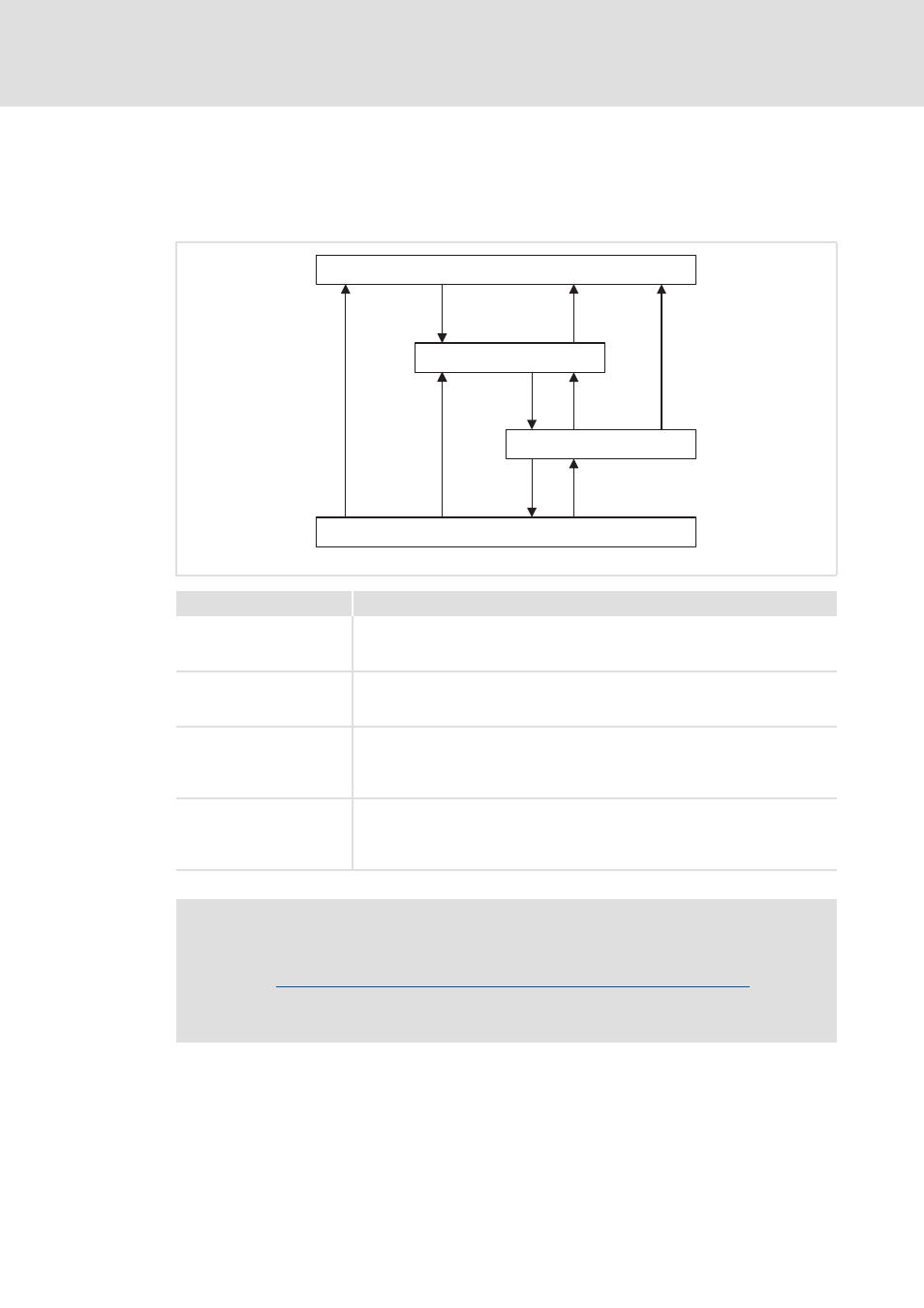
The EtherCAT state machine
Before communication via EtherCAT is possible, the bus runs through the EtherCAT state
machine during power-up. The following illustration shows the possible state change from
an EtherCAT slave's point of view:
E94AYCET009
Status
Description
Init
• Initialisation phase
• No SDO/PDO communication with the slaves
• Device can be detected by fieldbus scan
Pre-Operational
• The fieldbus is active.
• SDO communication (mailbox communication) is possible.
• No PDO communication
Safe-Operational
• SDO communication (mailbox communication) is possible.
• PDO communication:
–The input data is transmitted to the master and evaluated.
–The output data have the "Safe" state. It is not forwarded to the basic device.
Operational
• Normal operation
–SDO communication
–PDO communication
–Fieldbus synchronisation has been successful (if used)
Note!
• Scanning of the EtherCAT fieldbus is possible in all states:
Determining the physical EtherCAT configuration (fieldbus scan)
• SDO communication via the EtherCAT fieldbus is only possible when at least
the Pre-Operational state has been reached.
Operational
Pre-Operational
Init
Safe-Operational