Valve position option 58, Position mode valve control 58, Valve position option – Red Lion TCU User Manual
Page 66
VALVE POSITION OPTION
The Valve Position option of the TCU directly controls the position of a
valve. The Valve Motor Open and Valve Motor Close outputs independently
activate the valve motor to position the valve for closed loop control. The
TCU is capable of two Valve Position control modes: Position mode, in
which valve position slidewire feedback is used by the controller, and
Velocity mode, a special positioning algorithm in which no slidewire signal
is required.
Position Mode Valve Control
In Position mode valve control, the slidewire resistance, representing the
valve position, is measured by the TCU and scaled internally to equal 0% to
100%. The scaled valve position is compared with the output power to
determine if the valve needs to be repositioned. Since the output power and
valve position both range from 0% to 100%, and normally equal each other,
the output power display (%PW) represents valve position. Based on this
information, the valve can be positioned manually from the Manual (USEr)
mode of the controller. The output power can be manually ranged from 0% to
100% to position the valve.
In the event that the valve position feedback and the output power do not
agree, due to a faulty valve motor, binding valve or defective slidewire, a
valve fail alarm occurs, if desired. The valve fail alarm is based on a timer in
which the output power and valve feedback positions must match within a
preset time. A display message of “VALV” occurs in this event. Optionally,
an alarm event output can be programmed to signal the event to other
equipment. Once the alarm triggers, the output power and feedback positions
must match to silence the alarm. Setting the valve fail time parameter to zero
disables this feature and also silences a triggered alarm.
The controller also senses loss of slidewire feedback signal and can
activate the
open
or
close
outputs in such an event. See
Sensor Fail Preset
Power (OPFL),
page 25, for a description of this operation.
Example
:
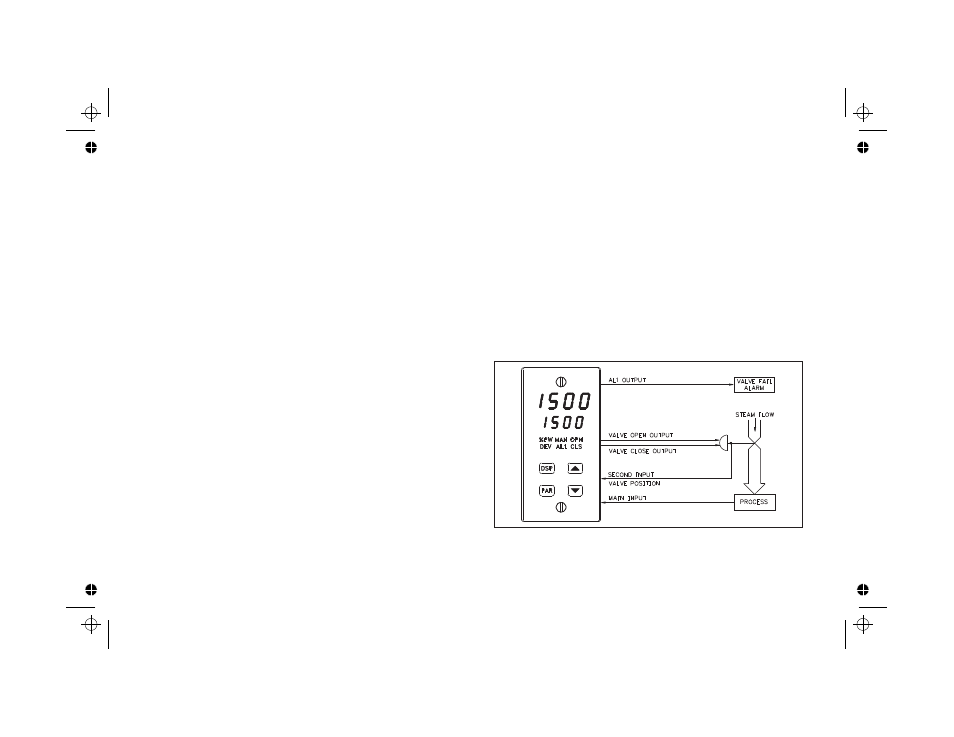
Steam is used to heat water by passing it through a heat exchanger.
Variations in inlet water temperature, steam pressure, hot water demand,
etc., all contribute to the need for closed loop control. The steam pressure is
controlled by a TCU with Valve Positioner option. A valve positioner with
1,000 ohm slidewire feedback is used. The TCU maintains constant hot
water temperature by controlling the position of the valve. Given the time
constant of the process is 60 seconds, the Valve Update Time (VUdt) of the
controller is set at five seconds to reduce valve activity. Adding Valve
Update Time to the valve motor transit time (20 seconds), the valve fail
time is set at 50 seconds [2 * (20+5)] to alert for a valve fail condition. The
valve position hysteresis is set at 2.0% to allow for valve motor overrun
and backlash, and also to provide a control deadband to reduce valve
activity. A minimum valve position is set to 20% to allow a minimum
amount of steam flow into the heat exchanger. The maximum valve
position is set at 100%. The following data is used to configure the Position
mode valve control parameters of the TCU:
VPS1
20.0
Scale minimum valve position to 20.0%
VPS2
100.0
Scale maximum valve position to 100.0%
Vudt
5
Update valve position, at most, once every 5
seconds
VPdb
2.0
Set valve position deadband to 2.0%
VFAL
50
Set valve fail timer to 50 seconds
58
Figure 28, Motorized Valve Positioner